統覚アーキテクチャ
多センサ多関節ロボットの感覚情報処理
- 広範囲の環境とその時間的変化の記述
- 短期記憶の生成とそれを利用した変化の検出
- 多種類の感覚情報の利用の簡素化
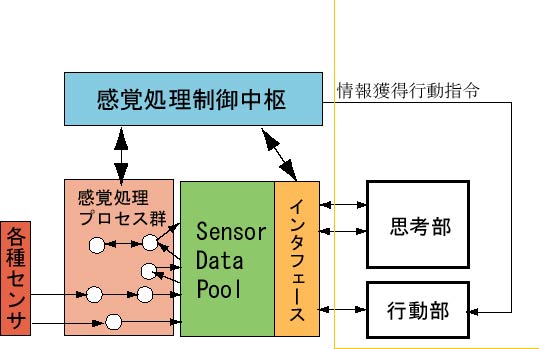
- 統覚アーキテクチャ:多種類の感覚情報への統一的インタフェース
- 情報獲得行動の自動生成
パノラマラベル画像
時間的・空間的に広範囲の環境の記憶
- 概念図
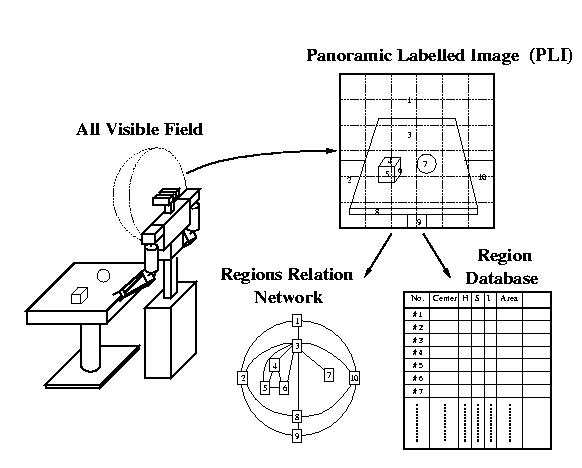
- パノラマラベル画像

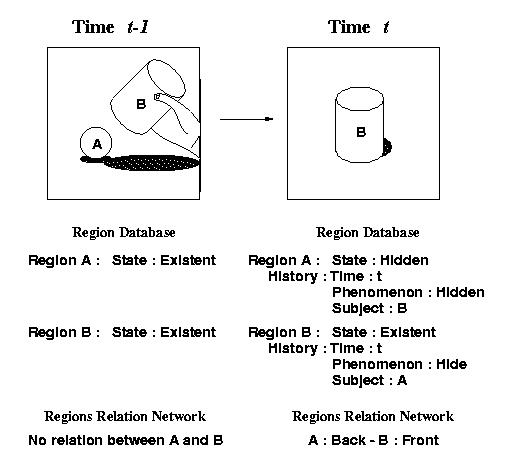
変化の検出
統覚アーキテクチャ
- 多種類の感覚情報への統一的なインタフェースを提案
- 適切な感覚情報変換プロセスを自動選択
情報獲得行動の自動生成
- ロボットの行動は次の2種類に分類できる:
- 環境についての情報を獲得するための行動
- 実際に環境あるいはロボット自身に変化を与えるための行動
- 情報獲得行動は短期記憶により省略することが可能
- 情報獲得行動は、必要な情報の種類(座標、色など)を指定するだけで
自動生成が可能
発表文献
- K. Kayama, K. Nagashima, A. Konno, M. Inaba, H. Inoue:
Panoramic-Environmental Description as Robots' Visual Short-Term Memory,
IEEE International Conference on Robotics and Automation,
pp. 3253--3258, 1998.
- 香山健太郎、稲邑哲也、加賀美聡、稲葉雅幸、井上博允:
移動行動体における視覚記憶に基づいた予測環境と実環境の差異の検出,
第16回日本ロボット学会学術講演会 予稿集,
pp. 1517--1518, 1998.
- 香山健太郎、長嶋功一、近野敦、稲葉雅幸、井上博允:
短期的な記憶に基づく環境変化の検出・記録が可能な広範囲環境記述法,
日本機械学会論文集 C編,
No. 65, Vol. 632, pp. 1524--1529, 1999.
- 香山健太郎、長嶋功一、加賀美聡、稲葉雅幸、井上博允:
座標系による抽象度分類に基づく感覚記憶ベースの人間型ロボットアーキテクチャ,
ロボティクス・メカトロニクス '99 講演会 講演論文集,
1999.
 香山 健太郎
kaya [at] jsk.t.u-tokyo.ac.jp
香山 健太郎
kaya [at] jsk.t.u-tokyo.ac.jp