|
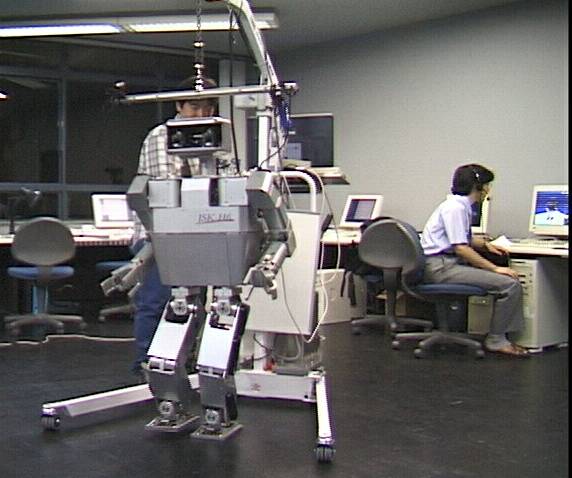
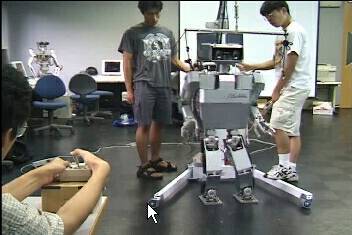
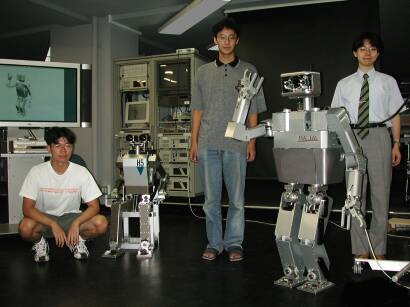
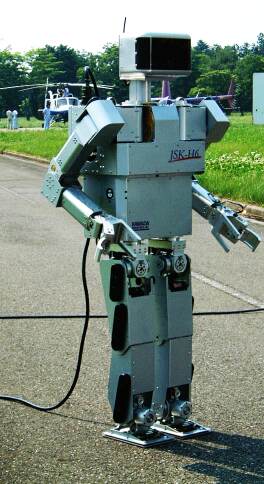
Human-shaped robots are well-suited for operating within environments designed for real humans. In order to provide an experimental research platform for full-body integrated sensing and control, the prototype Humanoid Robot "H6" is currently being developed at the JSK Laboratory at the University of Tokyo. | 
|