|
|
|
|
 Research summary
Research summary
|
|
|
In order for a humanoid robot to navigate the real world, it must be
able to navigate around obstacles
For this project, we are developing a system that can create
efficient obstacle avoidance. The robot must visually
recognize an unknown obstacle and then take into
consideration its height and width. Even when the robot is being
remotely controlled, we aim for it to automatically avoid obstacles,
so that the robot can move safely without relying on the operator's skill.
|
|
|
|
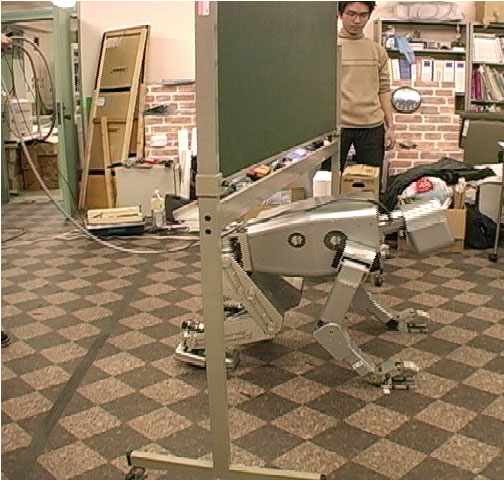
Crawling to pass through
an area of limited height

Narrowing its shoulders
to pass through an area of limited width
|
|
|
Movies
|
|
- Crawling to pass through an area of limited height [mpg]
- Narrowing its shoulders to pass through an area of limited
width [mpg]
|
|
|
References
|
|
- 藤本 隆司, 西脇 光一, 加賀美 聡, 稲葉 雅幸, 井上 博允.
"ヒューマノイドにおける狭隘空間通り抜け動作生成法".
ロボティクス・メカトロニクス講演会'03, pp.2P2-1F-F3, 2003.
|

