|
|
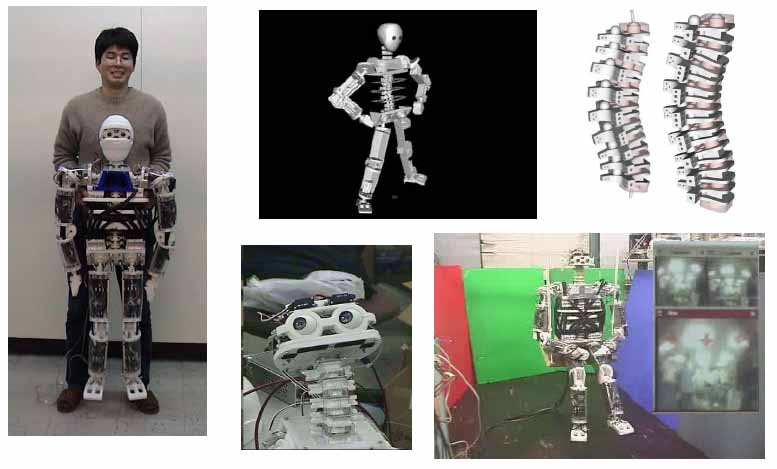
脊椎を持つ全身腱駆動型ヒューマノイド 腱太
- 目的
- 脊椎を利用した全身行動
- 人間らしい動作
- 複雑な構造の多自由度ロボットの開発法・制御法
- 参考文献
- 水内 郁夫, 和井田 博則, 吉海 智晃, 中西 雄飛, 稲葉 雅幸, 井上 博允:
``筋骨格脊椎ヒューマノイドとその筋駆動腰脚部の構成法に関する研究``,
第24回バイオメカニズム学術講演会SOBIM2003講演予稿集, pp.21--24, 2003
- 吉海 智晃, 西田 武史, 大竹 智尚, 水内 郁夫, 稲葉 雅幸, 井上 博允:
``冗長干渉駆動系の制御戦略模索のための筋配置可変型ハンドの開発``,
第24回バイオメカニズム学術講演会SOBIM2003講演予稿集, pp.29--32, 2003
- 水内 郁夫, 吉海 智晃, 吉田 成徳, 中西 雄飛, 大竹 智尚, 稲葉 雅幸, 井上 博允:
``複雑な身体構造のロボットの情報システムの研究``,
第21回日本ロボット学会学術講演会講演論文集, 3H33, 2003
- 水内 郁夫, 和井田 博則, 中西 雄飛, 吉海 智晃, 稲葉 雅幸, 井上 博允:
``筋の追加・配置変更が容易な人間規範筋骨格型ロボットの腰脚部'',
第21回日本ロボット学会学術講演会講演論文集, 1C29, 2003
- 水内 郁夫, 中西 雄飛, 吉海 智晃, 稲葉 雅幸, 井上 博允:
``冗長筋骨格型ヒューマノイドの身体情報を獲得するソフトウェアシステム'',
第21回日本ロボット学会学術講演会講演論文集, 1C2a, 2003
- 吉海 智晃, 水内 郁夫, 稲葉 雅幸, 井上 博允:
``連続タスクにおける強化学習手法を用いたヒューマノイドKentaの型模倣行動獲得'',
第21回日本ロボット学会学術講演会講演論文集, 2A28, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
``Behavior Developing Environment for the Large-DOF Muscle-driven Humanoid Equipped with Numerous Sensors'',
In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, pp.1940--1945, 2003
- Tomoaki Yoshikai, Shigenori Yoshida, Ikuo Mizuuchi, Daisuke Sato, Masayuki Inaba, and Hirochika Inoue:
``Multi-sensor guided behaviors in whole body tendon-driven humanoid Kenta'',
Proceedings of the 2003 IEEE Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI), pp.--, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue:
"Behavior System Design and Implementation in Spined Musle-Tendon Humanoid 'Kenta'",
Journal of Robotics and Mechatronics, Vol.15, No.2, pp.143--152, 2003
- 吉海 智晃, 水内 郁夫, 稲葉 雅幸, 井上 博允:
``聴覚反応行動のための音情報処理系の構築と腱太における実装'',
日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集,
2A1-1F-E4, 2003
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Mustle-Tendon Humanoid'',
Robotics Research , ISRR2001,
pp.1--15, 2002
- 水内 郁夫, 吉海 智晃, 佐藤 大輔, 吉田 成徳, 稲葉 雅幸, 井上 博允:
``脊椎を持つ全身腱駆動ヒューマノイド腱太によるブランコ動作'',
日本ロボット学会創立20周年記念学術講演会講演論文集,
1C38, 2002
- 吉海 智晃, 水内 郁夫, 佐藤 大輔, 吉田 成徳, 稲葉 雅幸, 井上 博允:
``ヒューマノイド腱太の模倣行動における随意・反射行動の統合'',
日本ロボット学会創立20周年記念学術講演会講演論文集,
1C36, 2002
- 佐藤 大輔, 水内 郁夫, 吉海 智晃, 稲葉 雅幸, 井上 博允:
``感覚情報を持つロボットによる人間の意図認識動作システム'',
日本ロボット学会創立20周年記念学術講演会講演論文集,
3G19, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue:
"The Design and Control of the Flexible Spine of a Fully Tendon-Driven Humanoid ``Kenta''",
Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2527--2532, 2002
- 吉海 智晃, 佐藤 大輔, 但馬 竜介, 水内 郁夫, 國吉 康夫, 稲葉 雅幸, 井上 博允:
``ヒューマノイド腱太における随意・反射・状況反応行動の統合による適応性の実現'',
日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集,
2P2-L06, 2002
- 水内 郁夫, 但馬 竜介, 長嶋 功一, 吉海 智晃, 佐藤 大輔, 稲葉 雅幸, 國吉 康夫, 井上 博允:
``多種入出力を持つ全身腱駆動脊椎ヒューマノイド腱太のための拡張可能な通信システム構成'',
日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集,
1P1-F02, 2002
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Koichi Nagashima, and Hirochika Inoue:
``Building Spined Muscle-Tendon Humanoid'',
Proceedings of International Symposium on Robotics Research, 2001
- 稲葉 雅幸, 長嶋 功一, 水内 郁夫, 但馬 竜介, 吉海 智晃, 國吉 康夫, 井上 博允:
“脊椎を持つ全身腱駆動ヒューマノイド「腱太」の開発
--- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その1) ---”,
第19回日本ロボット学会学術講演会予稿集,
pp.775--776, 2001
- 水内 郁夫, 稲葉 雅幸, 長嶋 功一, 但馬 竜介, 吉海 智晃, 國吉 康夫, 井上 博允:
“全身型ヒューマノイドの多自由度柔軟脊椎構造の設計と制御
--- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その2) ---”,
第19回日本ロボット学会学術講演会予稿集,
pp.777--778, 2001
- 但馬 竜介, 水内 郁夫, 吉海 智晃, 長嶋 功一, 國吉 康夫, 稲葉 雅幸, 井上 博允:
“球面ジョイントを用いたヒューマノイドの四肢構造
--- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その3) ---”,
第19回日本ロボット学会学術講演会予稿集,
pp.779--780, 2001
- 吉海 智晃, 稲葉 雅幸, 水内 郁夫, 但馬 竜介, 長嶋 功一, 和井田 寛則, 國吉 康夫, 井上 博允:
“脊椎を持つヒューマノイドにおける頭部構造と注視制御
--- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その4) ---”,
第19回日本ロボット学会学術講演会予稿集,
pp.781--782, 2001
- 稲葉 雅幸, 水内 郁夫, 但馬 竜介, 吉海 智晃, 長嶋 功一, 和井田 寛則, 國吉 康夫, 井上 博允:
“介護動作の訓練に利用可能なヒューマノイドの身体応答調節機能の研究
--- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その5) ---”,
第19回日本ロボット学会学術講演会予稿集,
pp.783--784, 2001
|
|
|

 までお願いします.
までお願いします.