|
|
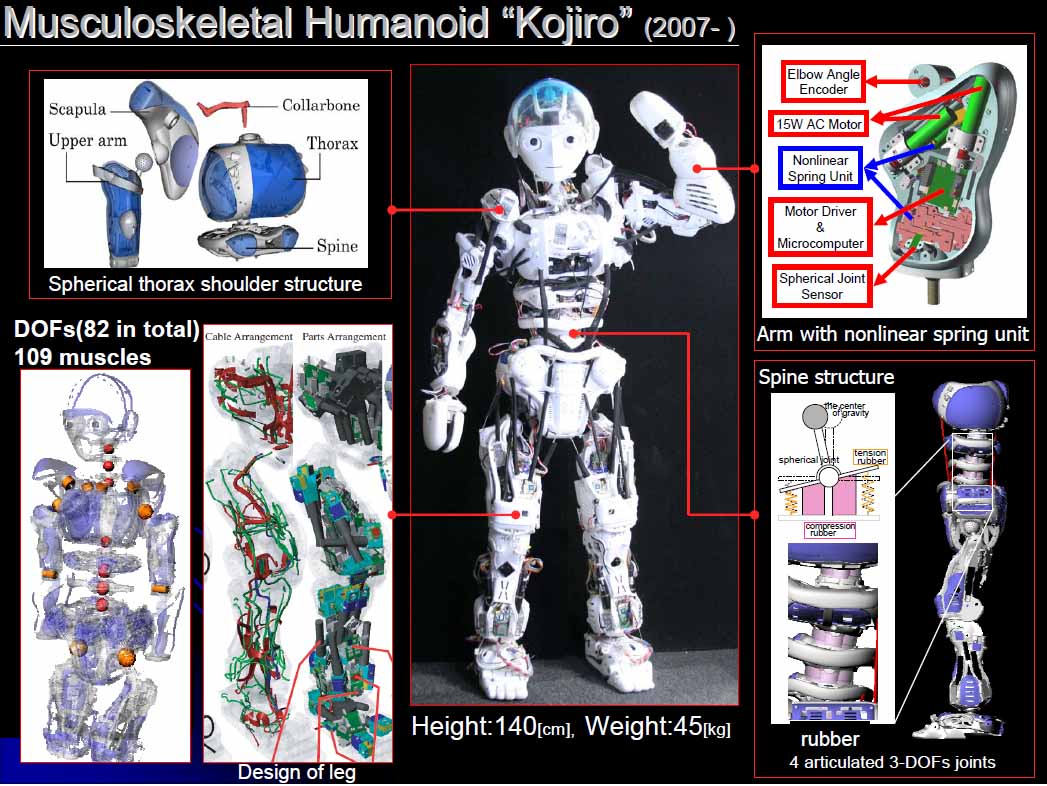
小次郎
- Papers
- Ikuo Mizuuchi, Yuto Nakanishi, Yoshinao Sodeyama, Yuta Namiki,
Tamaki Nishino, Naoya Muramatsu, Junichi Urata, Kazuo Hongo, Tomoaki
Yoshikai, Masayuki Inaba: An Advanced Musculoskeletal Humanoid
Kojiro, in Proceedings of the 2007 IEEE-RAS International Conference
on Humanoid Robots (Humanoids 2007), 2007.
- Ikuo Mizuuchi, Tamaki Nishino, Yoshinao Sodeyama, Yuto
Nakanishi, Yuta Namiki, Tomoaki Yoshikai, Masayuki Inaba: An
Autonomous Reactive System for Humanoids Equipped with Very Many
Actuators and Sensors, in Proceedings of the 2007 IEEE-RAS
International Conference on Humanoid Robots (Humanoids 2007), 2007.
- 水内 郁夫, 中西 雄飛, 袖山 慶直, 並木 勇太, 西野 環, 村松 直哉,
浦田 順一, 本郷 一生, 吉海 智晃, 稲葉 雅幸: 筋骨格型ヒューマノイド小
次郎プロジェクト, in 第25回日本ロボット学会学術講演会講演論文集,
2H21, 2007.
- 中西雄飛, 並木勇太, 本郷一生, 浦田順一, 水内郁夫, 稲葉雅幸: 冗
長かつ高出力アクチュエータを実装した筋骨格腱駆動ヒューマノイド小次郎
脚部の開発, in 第25回日本ロボット学会学術講演会講演論文集, 2H23,
2007.
- Yuto Nakanishi, Yuta Namiki, Kazuo Hongo, Junichi Urata, Ikuo
Mizuuchi, Masayuki Inaba: Design of the Musculoskeletal Trunk and
Realization of Powerful Motions Using Spines, in Proceedings of the
2007 IEEE-RAS International Conference on Humanoid Robots (Humanoids
2007), 2007.
- Yuto Nakanishi, Yuta Namiki, Kazuo Hongo, Junichi Urata, Ikuo
Mizuuchi, Masayuki Inaba: Realization of Large Joint Movement while
Standing by a Musculoskeletal Humanoid Using its Spine and Legs
Coordinately, in Proceedings of The 2008 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.205--210,
2008.
- 袖山慶直, 西野環, 浦田順一, 水内郁夫, 稲葉雅幸: 球体胸郭上を回
転摺動する肩甲骨を有する筋骨格ヒューマノイドの広可動肩関節複合体の設
計, in 第25回日本ロボット学会学術講演会講演論文集, 2H25, 2007.
- Yoshinao Sodeyama , Tamaki Nishino, Yuta Namiki, Yuto
Nakanishi, Ikuo Mizuuchi, Masayuki Inaba: The Designs and Motions of
a Shoulder Structure with a Spherical Thorax, Scapulas and
Collarbones for Humanoid ``Kojiro'', in Proceedings of The 2008
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.1465--1470, 2008.
- 並木勇太, 中西雄飛, 浦田順一, 袖山慶直, 水内郁夫, 稲葉雅幸: 筋
骨格ヒューマノイド小次郎の背骨,骨盤からなる体幹構造の設計と実装, in
第25回日本ロボット学会学術講演会講演論文集, 2H24, 2007.
- 西野環, 袖山慶直, 吉海智晃, 岡田慧, 水内郁夫, 稲葉雅幸: 筋骨格
ヒューマノイド小次郎の頭部・眼球機構の設計, in 第25回日本ロボット学
会学術講演会講演論文集, 2H26, 2007.
- 村松直矢, 吉田真璃子, 水内郁夫, 稲葉雅幸: 関節剛性調整可能な筋
骨格システムのためのコンパクトな非線形ばねユニットの設計, in 第25回
日本ロボット学会学術講演会講演論文集, 2H22, 2007.
- 本郷 一生, 中西 雄飛, 並木 勇太, 水内 郁夫, 稲葉 雅幸: 筋骨格多
自由度ヒューマノイド小次郎の脚部による足首6軸力センサを用いた反射的
足踏み行動の実現, in 第25回日本ロボット学会学術講演会講演論文集,
3H26, 2007.
- Kazuo Hongo, Yuto Nakanishi, Yuta Namiki, Ikuo Mizuuchi,
Masayuki Inaba: Automatic Parameter Adjustment of Reflexive Walking
of a Musculo-Skeletal Humanoid, in Proceedings of the 2008 IEEE-RAS
International Conference on Humanoid Robots, pp.16--21, 2008.
|
|
|

 までお願いします.
までお願いします.