|
|
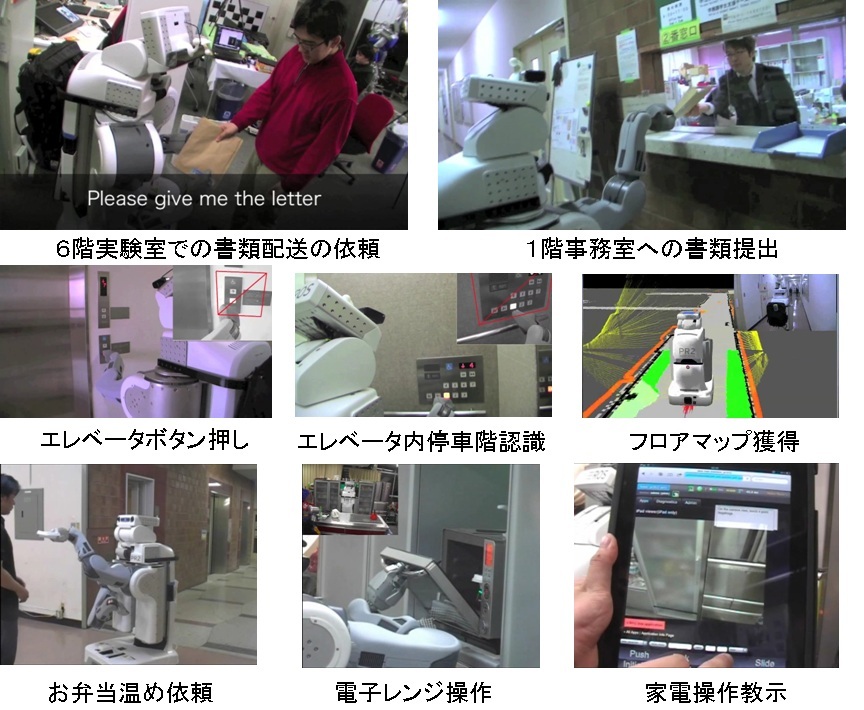
全方位移動双腕パーソナルロボットPR2
PR2 Beta Programに採択
され,パーソナルロボットPR2による室内移動,フロ
ア間移動,物品搬送,家電操作,家具家電操作教示,対人インタフェース,
マルチロボット統合実験等の行動実現方式の研究を行っている.
- 参考文献
- 東馳, 斉藤学, 伊藤司, 岡田慧, 稲葉雅幸:
マニピュレーションロボットによる可変構造環境操作のための指示・認識システム,
計測自動制御学会論文集, Vol.48, No.2, pp.86--92, 2012.
- Manabu Saito, Haseru Chen, Kei Okada, Masayuki Inaba, Lars Kunze, Michael Beetz: Semantic Object Search in Large-scale Indoor Environments, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Workshop on Active Semantic Perception and Object Search in the Real World, 2011.
- 斉藤 学, 岡田 慧, 稲葉 雅幸:
等身大ロボットの自律移動中における周辺人物に不安感を与えないロボット行動,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集,
2A1-H15, 2011.
- 陳 騁, 岡田 慧, 稲葉 雅幸:
移動マニピュレーションロボットにおける自律性の安全動作を含むGUI,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集,
2A1-H15, 2011.
- 斉藤学, 陳騁, 岡田慧, 稲葉雅幸:
フロア間自律移動可能なマニピュレーションロボットのタスク要求精度を考慮
した動作システム, in 第11回SICEシステムインテグレーション部門講演会
講演概要集, 2E3-4, 2010.
- 陳 騁, 斉藤 学, 伊藤 司, 岡田慧, 稲葉雅幸:
マニピュレーションロボットによる環境可変構造操作のための指示・認識システム,
in 第11回SICEシステムインテグレーション部門講演会講演概要集, 1E1-3, 2010.
|
|
|

 までお願いします.
までお願いします.