|
|
科学研究費補助金 基盤研究(S): 2004-2008
等身大ヒューマノイドにおける知能ロボットカーネルの統合と対人行動創成への展開
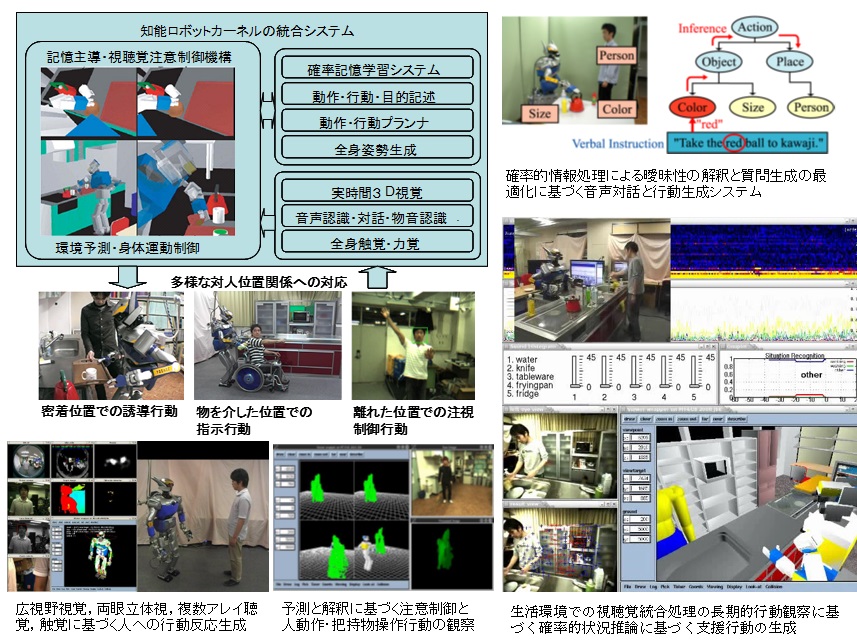
知能ロボットの代表的形態である等身大ヒューマノイドにおいて,運動空間知
覚・全身行動生成・モデル記憶管理・プログラム生成機能などの高位の情報処
理技術を搭載した知能ロボットカーネルを統合し,等身大サイズヒューマノイ
ドの対人行動への新展開を目指すことを目的とした基盤研究である.
具体的には,(1)人の存在を知覚しその行為の意図仮説を確認しながらの行為
生成判断機能,(2)人と直接触れ合った状態における人からの働きかけに答え
られる協調反応と安全な自己身体の身のこなし行動,(3)人が操作している対
象物を仲立ちにして人の行為を支援できる行動立案と支援行為の実現,という
ように,人を中心にして,(1)人との距離が離れていても,(2)密着していても,
(3)物が仲立ちして共同行為を求められていても,その場の状況から自己のな
すべきことを判断して行動を決め,適切に行動を導いてゆくヒューマノイドの
感覚行動知能の実現原理を実証実験により明らかにしてゆくことを行っている.
- 参考文献
- 稲葉 雅幸,加賀美聡,西脇光一: 岩波講座 ロボット学7 ロボットアナトミー, 岩波書店, 2005,
総369頁(1p-87p, 157p-219p, 299p-360p).
- T. Inamura, K. Okada, S. Tokutsu, N. Hatao, M. Inaba, Hirochika Inoue: "HRP-2W: A humanoid platform for research on support behavior in daily life environments", Robotics and Autonomous System,Vol.57, No.2, pp.145--154, 2009.
- 岡田 慧, 小島 光晴, 稲葉 雅幸 : "認識行動共有知識ベースシステムに
おける複数視覚特徴統合による物体認識", 日本ロボット学会誌, Vol. 26,
No. 6, pp .537-545, 2008.
- 稲邑哲也, 古城直樹, 畑尾直孝, 得津覚, 藤本純也, 園田朋之, 岡田慧, 稲葉雅幸: "飲料缶・ボトル類を目と手と耳で分別廃棄するヒューマノイド行動の実現", 日本ロボット学会誌, Vol.25, No.6, pp.15-23, 2007.
-
神崎秀, 岡田慧, 稲葉雅幸: 予測可能な衝撃力に対する予見制御に基づくヒューマノイドの身構え行動制御, 日本ロボット学会誌, Vol.25, No.7, pp.46-51, 2007.
- 稲葉 雅幸, 岡田 慧, 水内 郁夫, 稲邑 哲也: ヒューマノイドロボットのシステム実現 - ロボットシステム記述言語 EusLispによる実装,コンピュータソフトウェア, vol.23, no.2, pp.45-61, 2006.
- K. Okada, M. Kojima, S. Tokutsu, Y. Mori, T. Maki, M. Inaba : "Task Guided Attention Control and Visual Verification in Tea Serving by the Daily Assistive Humanoid HRP2JSK", Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1551-1557, フランス,2008年9月24日.
- S. Nozawa, T. Maki, M. Kojima, S. Kanzaki, K. Okada, M. Inaba : "Wheelchair Support by a Humanoid Through Integrating Environment Recognition", Proceedings of The 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 1558-1563, フランス,2008年9月24日.
- 稲邑 哲也,園田 朋之,川路 友博,岡田 慧,稲葉 雅幸,人間ロボット間の対話に基づく協調的タスク遂行のための確率的空間記憶モデル,第12回ロボティクスシンポジア,pp.46--51, 新潟県,2007年3月15日.
- Kei Okada, Mitsuharu Kojima, Yuichi Sagawa, Toshiyuki Ichino, Kenji Sato, Masayuki Inaba : "Vision based behavior verification system of humanoid robot for daily environment tasks", 2006 6th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2006), pp.7--12, イタリア,2006年12月15日.
- N. Kojo, T. Inamura, K. Okada, M. Inaba : "Gesture Recognition for Humanoids using Proto-symbol Space", 2006 6th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2006), pp 76-81, イタリア,2006年12月15日.
- T. Ogura, A. Haneda, K. Okada, M. Inaba : "On-site Humanoid Navigation Through Hand-in-Hand Interface", 2005 International Conference on Humanoid Robots, pp 175-180, つくば,2005年12月6日.
|
|
|

 までお願いします.
までお願いします.