|
|
Grant-in-Aid for Scientific Research (S): 2014-2018
Acquisition of Body Schema, Tool Usages and
Behavioral manner through Human Observation and Interactive Practice
on Various Humanoid Series
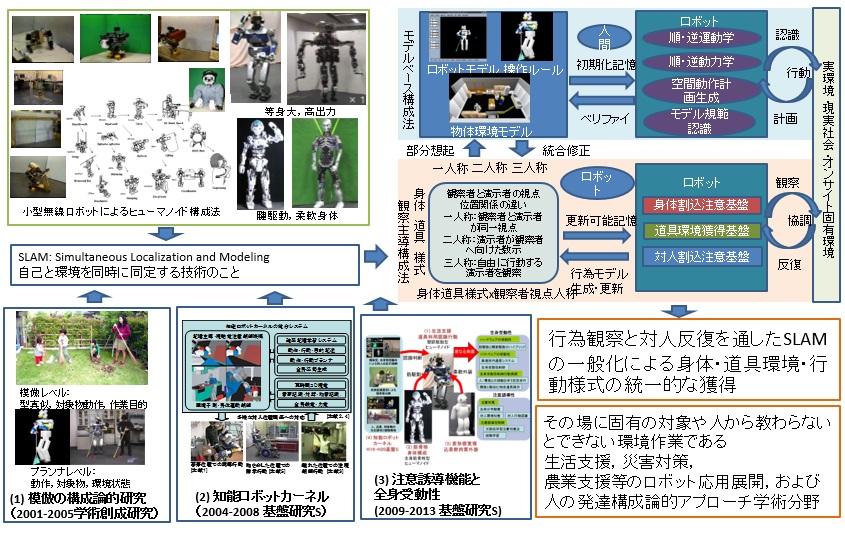
Considering anthropomorphic robots, i.e., hu-manoids, as a general
form of intelligent robots, we have developed various types of
humanoids rang-ing from small remote-brain robots to life-sized daily
assistive humanoids, high-torque and high-speed humanoids and human
mimetic mus-culoskeletal robots, while building up a common compatible
intelligent robot kernel. Moreover, we have developed an
observation-driven task-learning framework that enables humanoids to
imitate not only motions but also intentions of humans. This framework
includes an attention control system for observing people, their tools
and the manipulated objects, as well as a variety of multi-level
planners. Recently, we have integrated the software and hardware
techniques developed so far to build a life-sized humanoid with
whole-body passivity and attention inductivity.
The goal of our research is to incrementally dis-cover a basic
principle for various types of hu-manoid robots to obtain
automatically the knowledge of how they should act, which, until now,
has been given by humans manually. This process is composed of the
following three stages: 1) action learning through observation of
human demon-strations; 2) repeated practice with outcome eval-uations
provided by humans; 3) action modification through human intervention.
- Papers
-
Yaguchi, Hiroaki, Sato, Kenji, Kojima, Mitsuharu, Sogen, Kiyohiro,
Takaoka, Yutaka, Tsuchinaga, Masayoshi, Yamamoto, Takashi, Inaba,
Masayuki: Development of 3D viewer based teleoperation interface for Human Support Robot HSR,
ROBOMECH Journal, Vol.1, No.1, pp.10, 2014.
-
Wesley P. Chan, Iori Kumagai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Implementation of a Robot-Human Object Handover Controller on a Compliant Underactuated Hand Using Joint Position Error Measurements for Grip Force and Load Force Estimations,
in Proceedings of The 2014 IEEE International Conference on Robotics and Automation, pp.1190-1195, 2014.
-
Wesley P. Chan, Yohei Kakiuchi, Kei Okada, Masayuki Inaba: Determining
proper grasp configurations for handovers through observation of
object movement patterns and inter-object interactions during usage, in Proceedings of The 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1355-1360, 2014.
-
Toyotaka Kozuki, Takuma Shirai, Yuki Asano, Yotaro Motegi, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Muscle-tendon complex control by “Tension controlled Muscle” and “Non-linear Spring Ligament” for real world musculoskeletal body simulator Kenshiro,in Proceedings of The 2014 IEEE International Conference on Biomedical Robotics and Biomechatronics, pp.875--880, 2014.
-
Ryohei Ueda, Shunichi Nozawa, Kei Okada, Masayuki Inaba:
Biped Humanoid Navigation System Supervised through Interruptible User-Interface with Asynchronous Vision and Foot Sensor Monitoring,
in Proceedings of the 2014 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2014), pp.022, 2014.
-
Masaki Murooka, Shintaro Noda, Shunichi Nozawa, Yohei Kakiuchi, Kei
Okada, Masayuki Inaba: Manipulation Strategy Learning for Carrying
Large Objects based on Mapping from Object Physical Property to Object
Manipulation Action in Virtual Environment, in Proceedings of the 2014 IEEE International Conference on Automation Science and Engineering, pp.263-270, 2014.
- Wesley P. Chan, Matthew K. X. J. Pan, Elizabeth A. Croft, Masayuki Inaba:
Characterization of Handover Orientations used by Humans for Efficient Robot to Human Handovers,
in Proceedings of The 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1-6, 2015.
- Yuki Asano, Toyotaka Kozuki, Soichi Ookubo, Koji Kawasaki, Takuma
Shirai, Kohei Kimura, Kei Okada, Masayuki Inaba: A Sensor-driver
Integrated Muscle Module with High-tension Measurability and
Flexibility for Tendon-driven Robots, in Proceedings of The 2015
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.5960-5965, 2015.
-
Toyotaka Kozuki, Yotaro Motegi, Koji Kawasaki, Yuki Asano, Takuma Shirai, Soichi Ookubo, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Development of Musculoskeletal Spine Structure that Fulfills Great Force Requirement in Upper Body Kinematics,
in Proceedings of The 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2768--2773, 2015.
-
Yu Ohara, Masaki Murooka, Ryohei Ueda, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Configurable Autonomy Applicable to Humanoid Manipulation in Unstructured and Communication-Limited Environment,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.373--380, 2015.
-
Soichi Ookubo, Yuki Asano, Toyotaka Kozuki, Takuma Shirai, Kei OKADA, Masayuki INABA:
Learning Nonlinear Muscle-Joint State Mapping Toward Geometric Model-Free Tendon Driven Musculoskeletal Robots,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.765--770, 2015.
-
Kanae Kochigami, Jiang Jun, Yuriko Kakehashi, Chi Wun Au, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Walking Together Hand in Hand: Design and Evaluation of Autonomous Robot System That a Robot Recognizes Moving Direction with a Child's Assistance of Pulling Its Hand,
in Proceedings of the 2015 IEEE/SICE International Symposium on System Integration, pp.738--743, 2015.
-
Kohei Kimura, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Tricycle Manipulation by Arms and Legs of Humanoid Robot based on Active and Passive Switching Control System,
Journal of Robotics Society of Japan, Vol.34, No.7, pp.468-477, 2016.
-
Kohei Kimura, Yuki Asano, Toyotaka Kozuki, Takuma Shirai, Kei Okada, Masayuki Inaba:
Achievement of Pedaling Manipulation Based on Cooperative System for Active Leg and Passive Leg by Tendon-driven Humanoid,
Transactions of the Society of Instrument and Control Engineers, Vol.52, No.8, pp.428-436, 2016.
-
Masaki Murooka, Ryohei Ueda, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Planning and Execution of Groping Behavior for Contact Sensor based Manipulation in an Unknown Environment,
in Proceedings of The 2016 IEEE International Conference on Robotics and Automation, pp.3955-3962, 2016.
-
Noriaki Takasugi, Kunio Kojima, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Real-Time Skating Motion Control of Humanoid Robots for Acceleration and Balancing,
in Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.1356-1363, 2016.
- Iori Kumagai, Ryohei Ueda, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Achievement of localization system for humanoid robots with virtual horizontal scan relative to improved odometry fusing internal sensors and visual information,
in Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.666-673, 2016.
- Yasuhiro Ishiguro, Tatsuya Ishikawa, Kunio Kojima, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Online Master-Slave Footstep Control for Dynamical Human-Robot Synchronization with Wearable Sole Sensor,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.864--869, 2016.
-
Ryo Terasawa, Shintaro Noda, Kunio Kojima, Ryo Koyama, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Achievement of Dynamic Tennis Swing Motion by Offline Motion Planning
and Online Trajectory Modification Based on Optimization with a
Humanoid Robot, in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.1094--1100, 2016.
-
Masaya Kawamura, Soichi Ookubo, Yuki Asano, Toyotaka Kozuki, Kei Okada, Masayuki Inaba:
A Joint-Space Controller Based on Redundant Muscle Tension for Multiple DOF Joints in Musculoskeletal Humanoids,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.814--819, 2016.
-
Yuki Asano, Toyotaka Kozuki, Soichi Ookubo, Masaya Kawamura, Shinsuke Nakashima, Takeshi Katayama, Iori Yanokura, Toshinori Hirose, Kento Kawaharazuka, Shogo Makino, Youhei Kakiuchi, Kei Okada, Masayuki Inaba:
Human Mimetic Musculoskeletal Humanoid Kengoro toward Real World Physically Interactive Actions,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.876--883, 2016.
|
|
|