|
 References
References
|
|
- Kei Okada, Akira Fuyuno, Takeshi Morishita, Takashi Ogura, Yasumoto Ohkubo, Yasuyuki Kino, Masayuki Inaba, Hirochika Inoue : "Device Distributed Approach to Extensible Robot System using Intelligent Device Unit with Super-micro Processor", Journal of Robotics and Mechatronics, Vol. 16, No. 2, pp 208-216, 2004.
- Yasumoto Ohkubo, Kei Okada, Takeshi Morishita, Masayuki Inaba, Hirochika Inoue : "Portable Situation-Reporting System by a Palmtop Humanoid Robot for Daily Life", Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp 3553-3558, 2004.
- Yasumoto Ohkubo, Kei Okada, Takeshi Morishita, Masayuki Inaba, Hirochika Inoue : "Portable Situation-Reporting System by a Palmtop Humanoid Robot for Daily Life", 2004 JSME Conference On Robotics And Mechatronics, pp 2P1-H-70, 2004 (in Japanese).
|


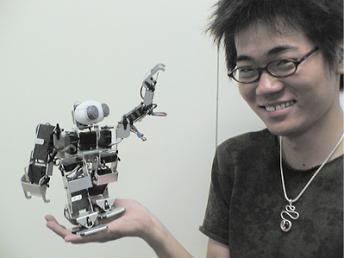
 PalmTop Humanoid
PalmTop Humanoid

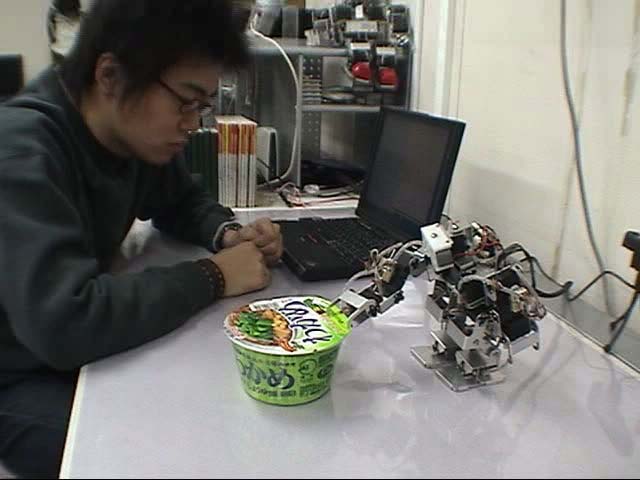 Reporting by measuring time
Reporting by measuring time
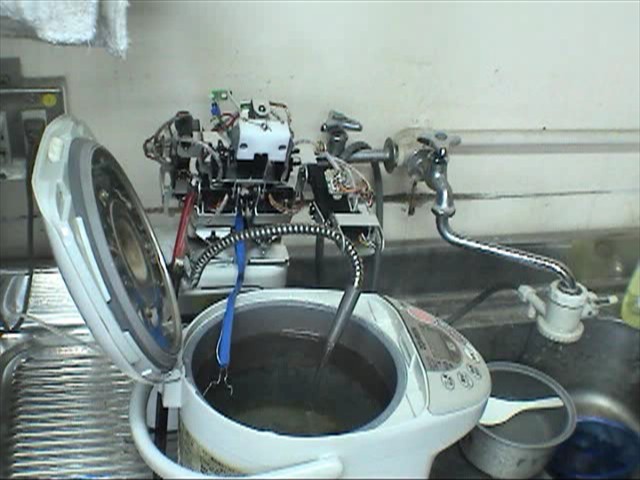 Reporting by sensor information
Reporting by sensor information
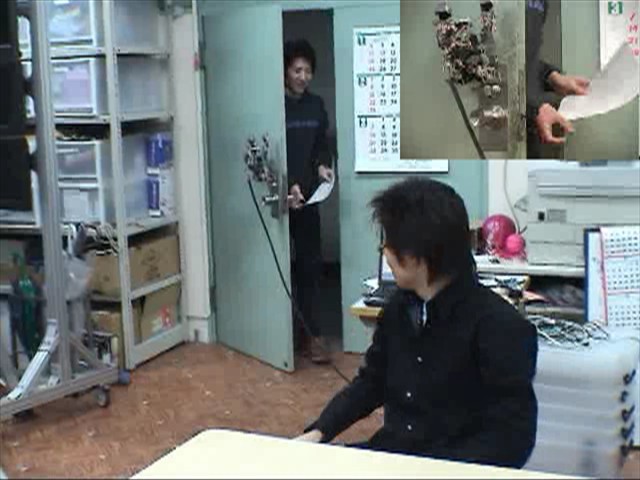
 Reporting by visual processing information
Reporting by visual processing information