 Japanese version is here.
Japanese version is here.
 |
 |
Last update on 2nd Oct., 1997
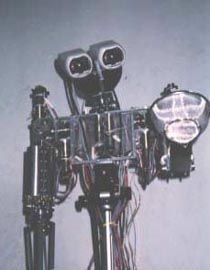
A light-weight, human-size and low-cost developing humanoid robot is developed [1]. The humanoid robot is named Saika (``outstanding intelligence'' in Japanese). The developed humanoid robot Saika has a two-DOF neck, dual five-DOF upper arms, a torso and a head. Several types of hands and forearms are developed. They are chosen depending upon the tasks to perform.
The features of Saika are:
| Hirochika Inoue | Professor |
| Masayuki Inaba | Associate Professor |
| Atsushi Konno | Research Associate |
| Koichi Nagashima | PhD candidate |
| Kentaro Kayama | Graduate student |
| Takahide Yoshiike | Graduate student |
| Takuro Noda | Graduate student |
| Koichi Nishiwaki | Graduate student |
| Ryosuke Kageyama | Graduate student |
| Hideko Yamamoto | Undergraduate student |
[1] Atsushi Konno, Koichi Nagashima, Ryo Furukawa,
Koichi Nishiwaki, Takuro Noda, Masayuki Inaba and Hirochika Inoue.
Development of a Humanoid Robot Saika.
Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS'97),
pp.805-810, 1997.
[2] Ryo Furukawa.
Study on learning of a robot arm's movement based on visual information.
Graduation Thesis, University of Tokyo, 1997 (In Japanese)
[3] Mitsunori Tada
Study on the grasping unknown objects using multi-fingered robot hand.
Graduation Thesis, University of Tokyo, 1997 (In Japanese)
[4] Koichi Nishiwaki
Study on the catch a ball behavior using a humanoid.
Graduation Thesis, University of Tokyo, 1997 (In Japanese)
[5] A. Konno, K. Nishiwaki, R. Furukawa, M. Tada, K. Nagashima,
M. Inaba and H. Inoue.
Dexterous Manipulations of Humanoid Robot Saika.
Preprints of Fifth Int. Symp. on Experimental Robots (ISER '97),
pp.46-57, 1997.
[6] A. Konno, M. Tada, K. Nagashima, M. Inaba and H. Inoue.
Development of a 3-Fingered Hand and Grasping Unknown Objects by Groping.
Proc. of IEEE Int. Symp. on Assembly and Task Planning (ISATP '97),
pp.72-77, 1997.
[7] Koichi NISHIWAKI, Atsushi KONNO, Koichi NAGASHIMA,
Masayuki INABA and Hirochika INOUE.
The Humanoid Saika that Catches a Thrown Ball.
Proc. of 6th IEEE Int. Workshop on ROBOT AND HUMAN COMMUNICATION
(RO-MAN'97),pp.94-99, 1997
[8] Koichi Nagashima, Takahide Yoshiike, Harunobu Oyama,
Atsushi Konno, Masayuki Inaba and Hirochika Inoue.
Interaction between Human and Humanoid Robot Head "Chiye."
Proc. of 6th IEEE Int. Workshop on ROBOT AND HUMAN COMMUNICATION
(RO-MAN'97),pp.100-105, 1997
[9] Kayama, K. and Nagashima, K. and Konno, A. and Inaba, M. and Inoue, H.
Panoramic-Environmental Description as Robots' Visual Short-Term Memory,
Proc. of IEEE International Conference on Robotics and Automation,
pp. 3253--3258, 1998
[10] Takahide Yoshiike, Atsushi Konno, Koichi Nagashima, Masayuki Inaba
and Hirochika Inoue,
On-line Recognition and Mimicking of Human Posture,
Proc. of the 3rd Int. Conf. on Advanced Mechatronics (ICAM '98),
pp.430--435, 1998
 Back to JSK Home page
Back to JSK Home page