| Experiment | How BeBe behaves | Internal image captured by BeBe's camera |
|---|---|---|
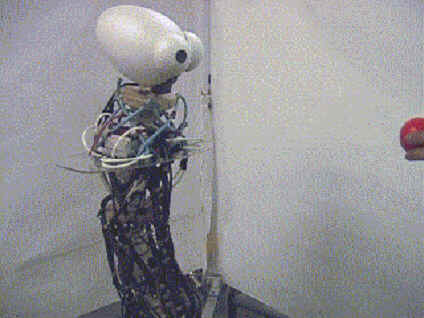
| Controlling the posture for tracking the target in the center of its camera view |
|
 |
| Executing tasks while adapting to the external force | 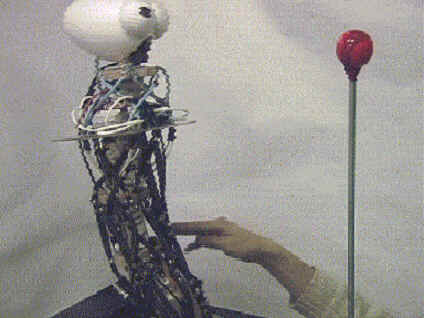 |
 |
| Executing tasks under the restriction (outputs of some muscles are fixed) | 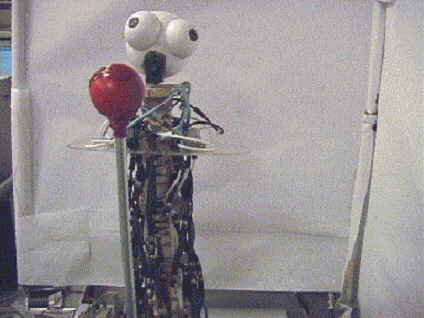 |
 |