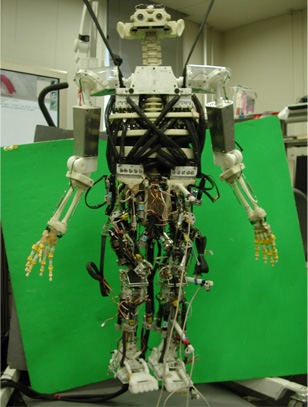
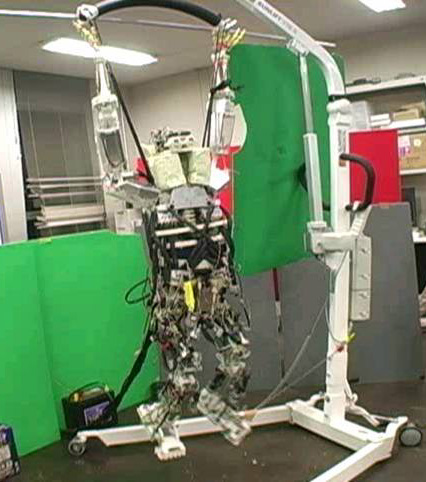
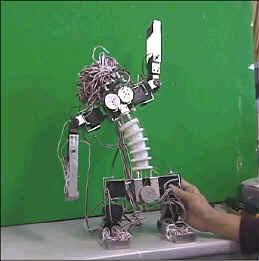
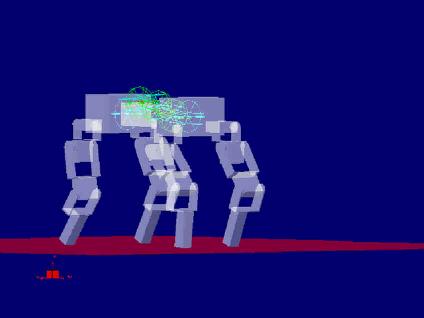
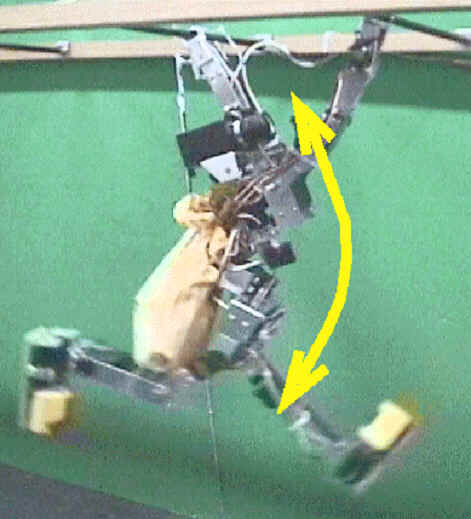
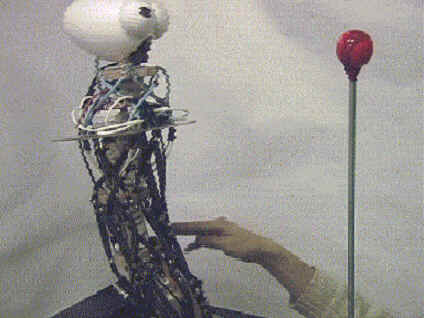
For realizing robots that can work around humans, both flexibility of the robots' body structure and softness of the robots' movements are indispensable functions. By implementing such functions, robots are expected to deal with various tasks and behave safely among humans at the same time. In our group, robots are designed to have soft spined structure or to be driven by the numerous number of muscles. Final goal for our researches is to construct the intelligent robotic system based on the robots' embodiment through mutual interaction between soft flexible robots and a real environment.
|
 |

 .
.