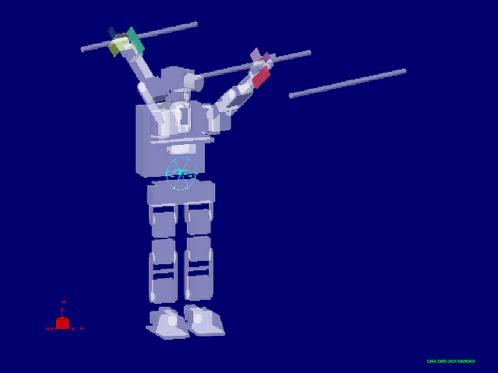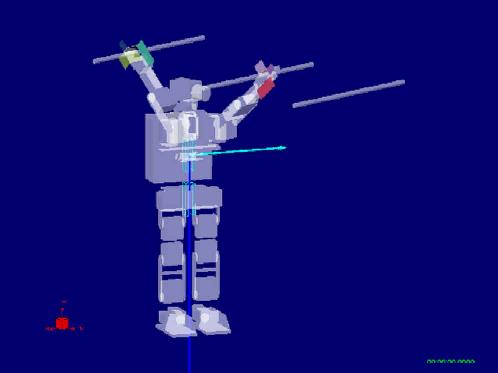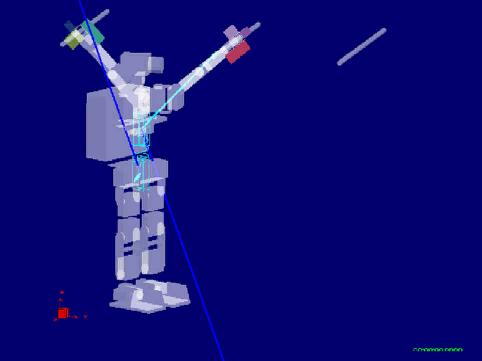
Simulation environment which includes soft flexible structures
Simulation while the torso keeps rigid state Simulation while the torso keeps soft state Simulation when the torso changes from a rigid state to a soft state
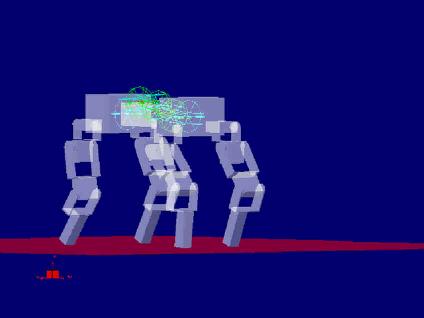
Before learning in the simulation |
|
After learning in the simulation |
|
Experiment by real robot using the result of the learning in the simulation |
|
【Note】 Movies are limited in the laboratory.