English
柔軟構造をもつロボットのシミュレーション環境
- 目的
- 柔軟構造を含むロボット全体の挙動予測
- 学習や遺伝的アルゴリズムとの組み合わせによる動作生成
- 柔軟性の動的変更のシミュレート
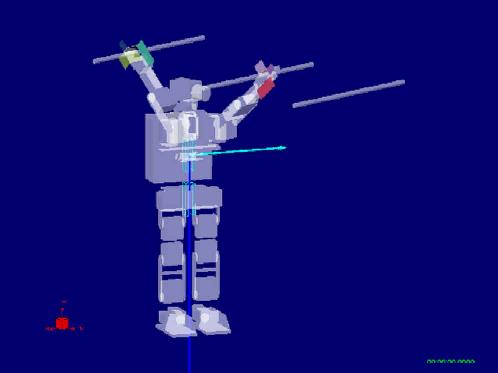
- 可変柔軟構造の体幹部を持つ人間型ロボットのシミュレーション
| 体幹部が剛体の場合 |
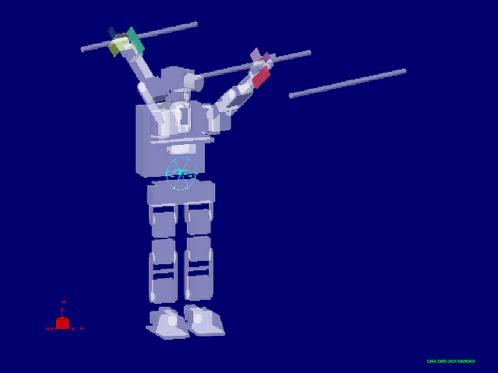 |
| 体幹部が柔軟な場合 |
 |
| 体幹部が剛から柔に変化する場合 |
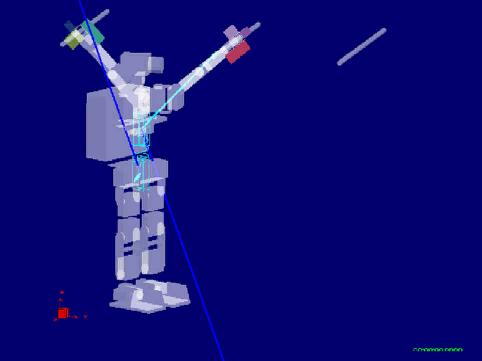 |
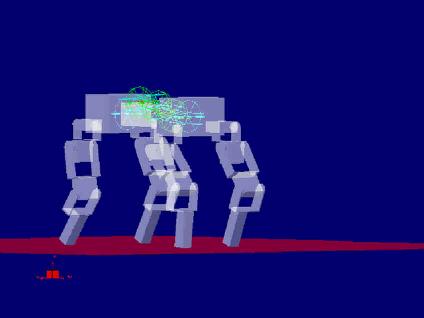
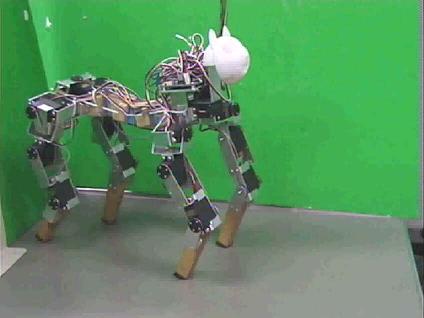
- 柔軟な脊椎構造を持つ四脚ロボットのシミュレーション
参考文献
- 松木 健, 水内 郁夫, 加賀美 聡, 稲葉 雅幸, 井上 博允: “脊椎構造を持つ四脚ロボットとそのシミュレーション環境”, 第16回日本ロボット学会学術講演会予稿集, 第1巻, pp.85--86,1998
- 水内 郁夫, 松木 健, 稲葉 雅幸, 井上 博允: “柔軟構造を含む人間型ロボットのシミュレーション環境と実ロボットの動作生成への適用”, 日本機会学会ロボティクス・メカトロニクス講演会’99講演論文集, 2A1-47-085, 1999
- 水内 郁夫, 稲葉 雅幸, 井上 博允: “可変柔軟構造を持つ人間型ロボットのシミュレーション環境”, 第17回日本ロボット学会学術講演会予稿集, 第3巻, pp.1197--1198, 1999
【注意】 動画像は内部専用です.
戻る