Japanese
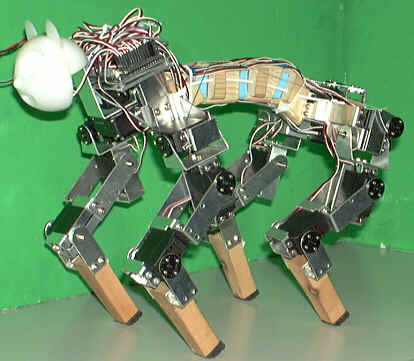
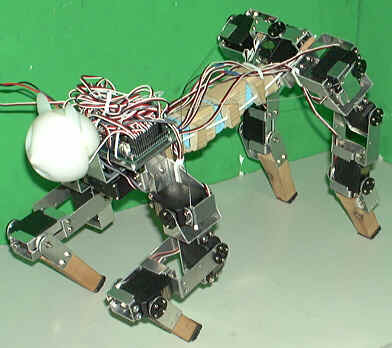
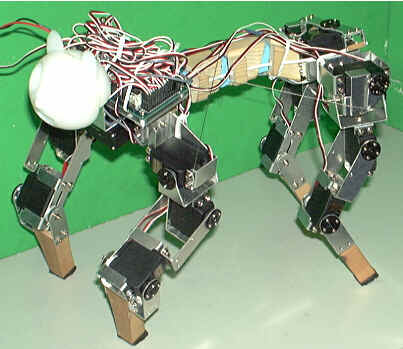
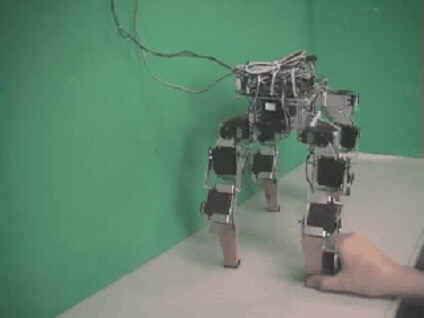
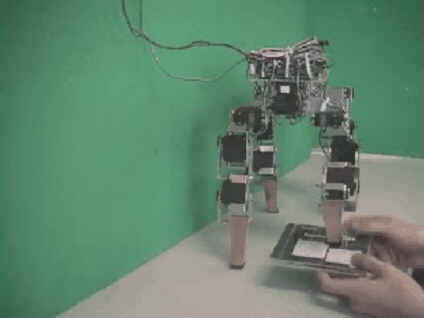
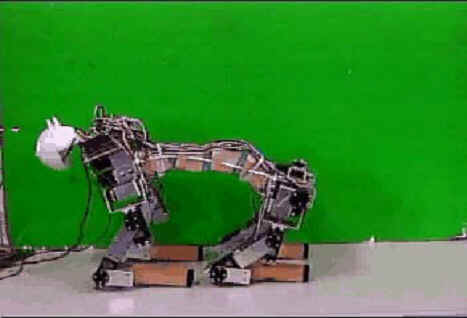
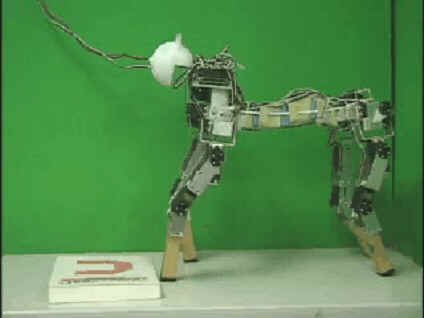
"SQ43": a quadruped spine robot
- Points
- Shock absorption
- Moving on a irregular surface using adaptation to the form of the surface
- Moving in a narrow place
- Some postures using spine's flexibility
References
- T. Matsuki, I. Mizuuchi, S. Kagami, M. Inaba, and H. Inoue: "Quadruped Robot with Spine Structure and Simulation Environment", Proc. of the 16th Annual Conference of the Robotics Society of Japan, Vol.1, pp.85--86, 1998
- T. Matsuki, I. Mizuuchi, S. Kagami, M. Inaba, and H. Inoue: "Motion Generation and Action Control of A Walking Quadruped Robot with Flexible Spine Structure", Proc. of 1999 JSME Conference on Robotics and Mechatronics (ROBOMEC'99), 1P2-42-063, 1999
- I. Mizuuchi, T. Matsuki, M. Inaba, and H. Inoue: "Simulation environment of humanoid robot which contains soft structure, and its application to real robot's motion generation", Proc. of 1999 JSME Conference on Robotics and Mechatronics (ROBOMEC'99), 2A1-47-085, 1999
- I. Mizuuchi, T. Matsuki, M. Inaba, and H. Inoue: "GA-based motion generation for quadruped robot which has soft spine structure.", Proc. of the 17th Annual Conference of the Robotics Society of Japan, Vol.1, pp.199--200, 1999
【Note】 Movies are limited in the laboratory.
Back