English
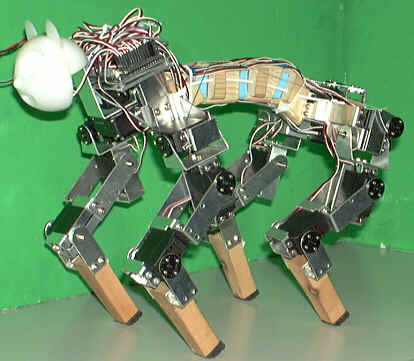
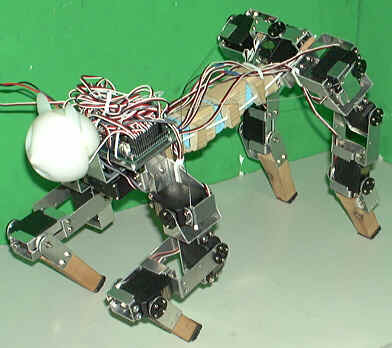
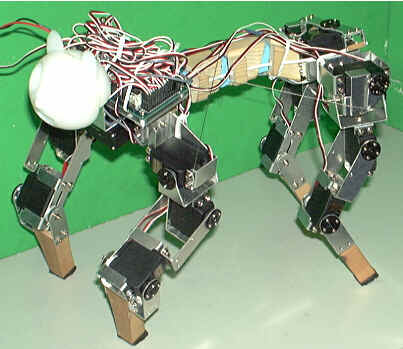
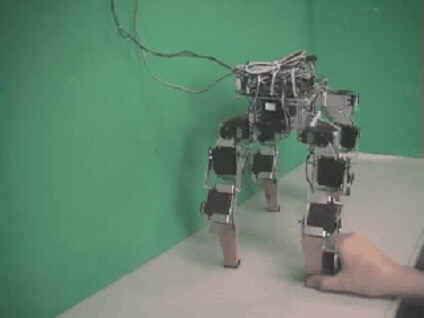
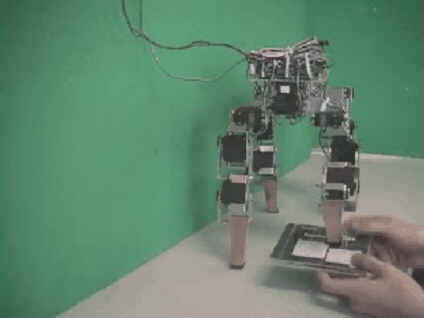
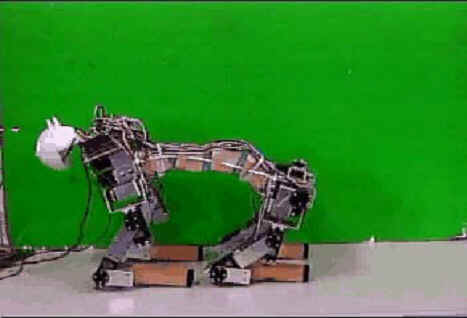
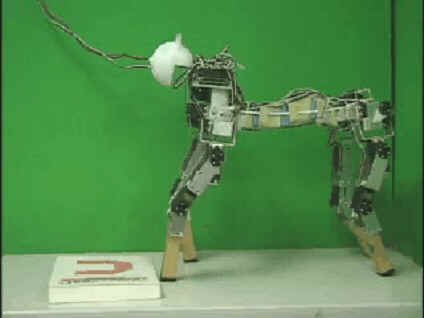
脊椎構造をもつ四脚ロボット
SQ43
- 目的
- 衝撃吸収性
- 地面の形状になじむ性質を利用した未知の不整地での移動
- 狭い場所での移動
参考文献
- 松木 健, 水内 郁夫, 加賀美 聡, 稲葉 雅幸, 井上 博允: “脊椎構造を持つ四脚ロボットとそのシミュレーション環境”, 第16回日本ロボット学会学術講演会予稿集, 第1巻, pp.85--86,1998
- 水内 郁夫, 松木 健, 稲葉 雅幸, 井上 博允: “柔軟構造を含む人間型ロボットのシミュレーション環境と実ロボットの動作生成への適用”, 日本機会学会ロボティクス・メカトロニクス講演会’99講演論文集, 2A1-47-085, 1999
- 松木 健, 水内 郁夫, 加賀美 聡, 稲葉 雅幸, 井上 博允: “柔軟な脊椎機構を持つ四脚歩行ロボットの動作生成と行動制御”, 日本機会学会ロボティクス・メカトロニクス講演会’99講演論文集, 1P2-42-063, 1999
- 水内 郁夫, 松木 健, 稲葉 雅幸, 井上 博允: “柔軟脊椎構造を持つ四脚ロボットのGAによる動作生成”, 第17回日本ロボット学会学術講演会予稿集, 第1巻, pp.199--200, 1999
【注意】 動画像は内部専用です.
戻る