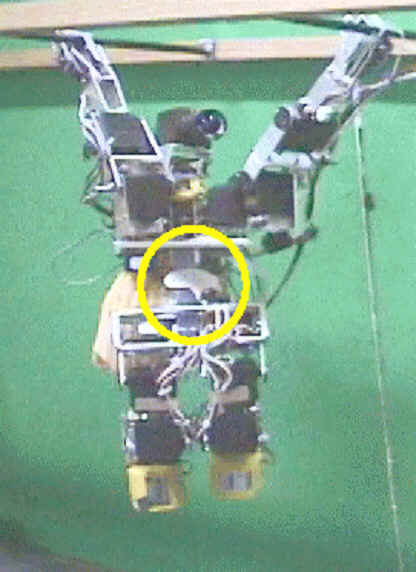
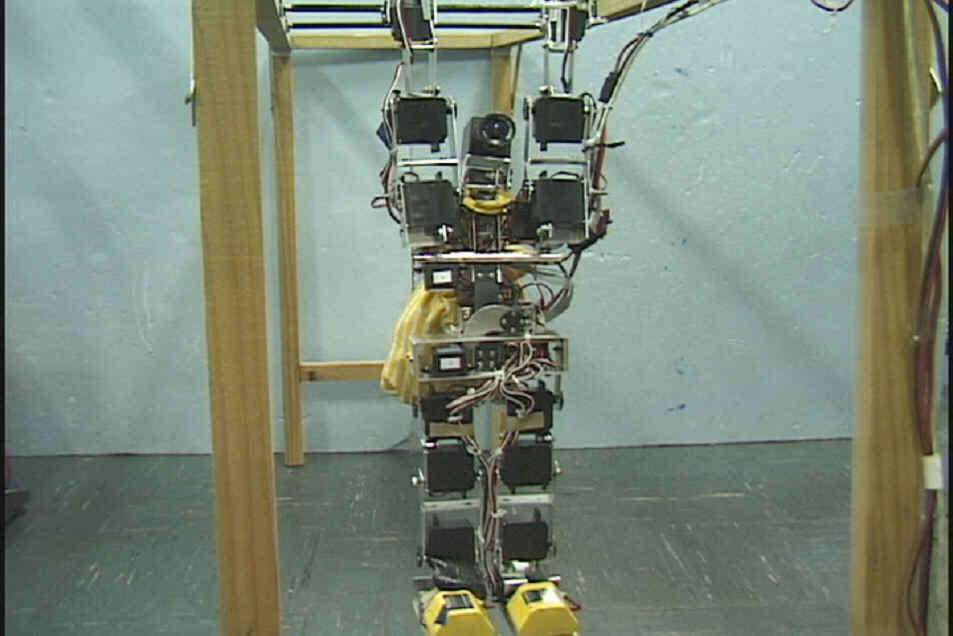
Legs are withdrawn and the torso becomes rigid for preparing to start brachiation. |
|
| For preparing to absorb the shock in grasping the next bar, the torso becomes soft in the air. | 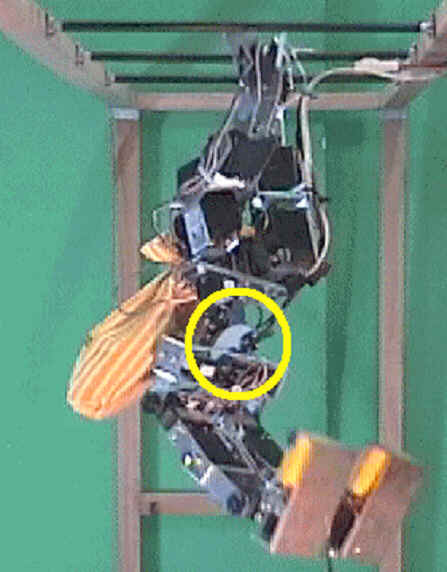 |
| Shock is absorbed by bending the torso flexibly when it grasps the next bar. | 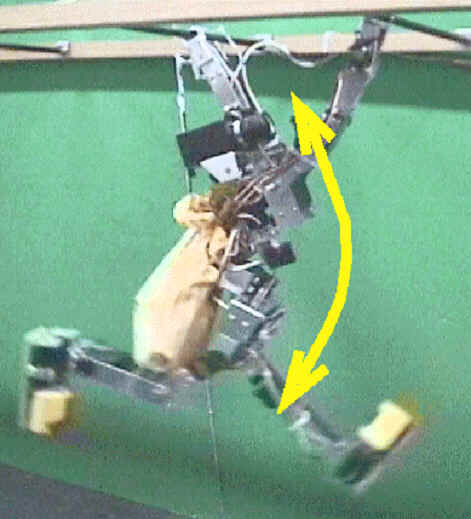 |