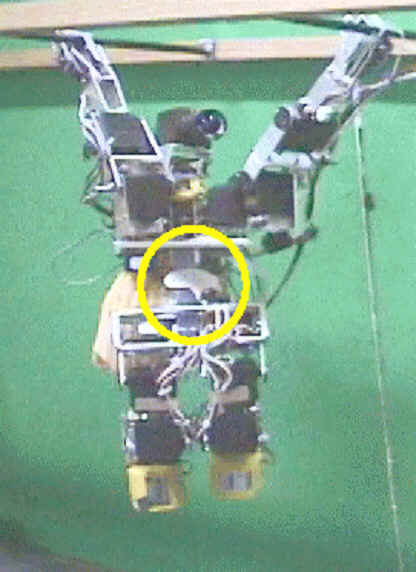
足を後ろに引いて準備する。体幹部は最も剛な状態。 |
|
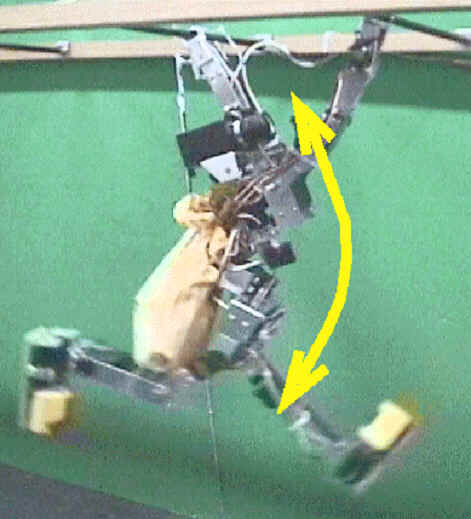
次バー把持時の衝撃に備え、空中で体幹部柔軟性を最も柔軟な状態にする。 |
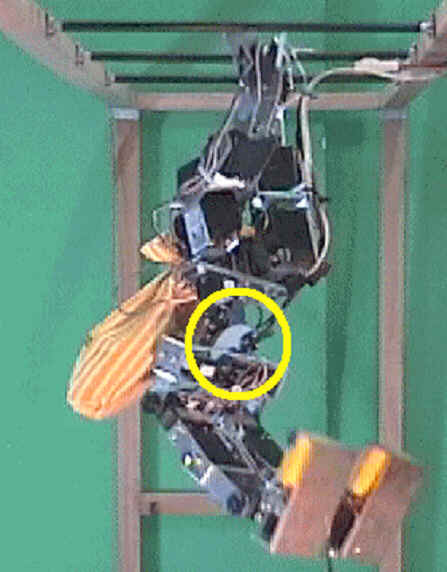 |
次バー把持時。体幹が大きく曲がり衝撃を吸収している。 |
 |
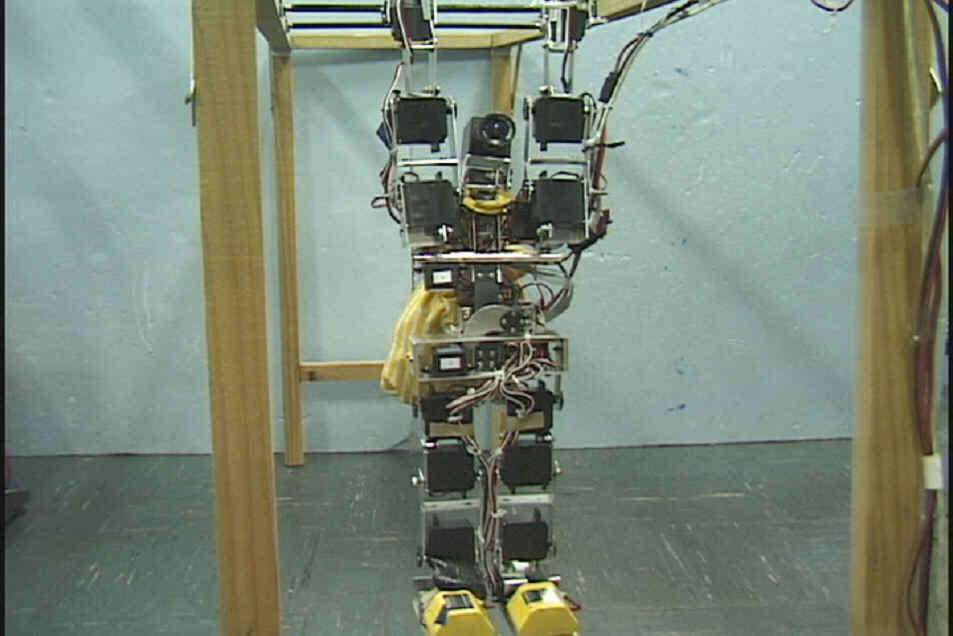
可変な柔軟構造の体幹部を持つ人間型ロボット Hanzou-S
足を後ろに引いて準備する。体幹部は最も剛な状態。 |
|
次バー把持時の衝撃に備え、空中で体幹部柔軟性を最も柔軟な状態にする。 |
|
次バー把持時。体幹が大きく曲がり衝撃を吸収している。 |
|
【注意】 動画像は内部専用です.