Possible postures of the spine
Changing the flexibility of the spine

Gymnastics
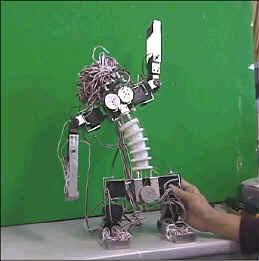
"Rabbit": a whole-body robot which has multi-joint flexible spine
Possible postures of the spine |
Changing the flexibility of the spine |
|
|
Gymnastics |
|
|
【Note】 Movies are limited in the laboratory.