English
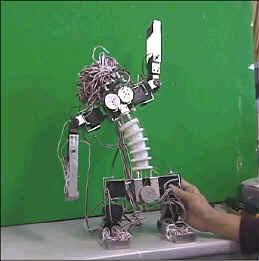
可変硬脊椎を持つ全身形ロボット Rabbit
目的
剛と柔とを使い分けた動作
6本の筋による脊椎の姿勢調節
多自由度を利用した動作
動作例
脊椎の動き
脊椎の硬さ調節
体操
参考文献
原 朗人, 水内 郁夫, 稲葉 雅幸, 井上 博允: “拮抗腱駆動型多関節体幹を有する全身行動体”, 第18回日本ロボット学会学術講演会予稿集, 第3巻, pp.1433--1434, 2000
【注意】 動画像は内部専用です.
戻る