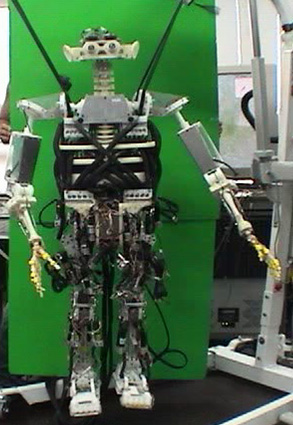
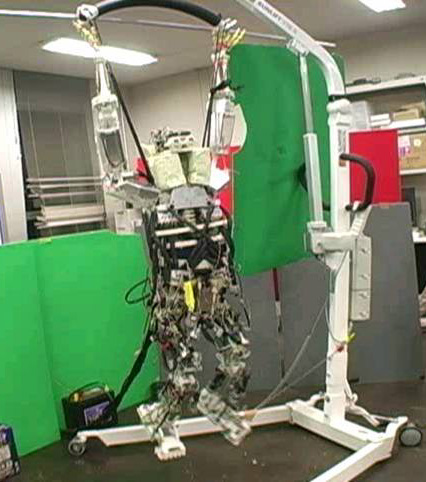
筋駆動ヒューマノイド腱太では実現が難しかった
を可能にするため,以下の脚腕を腱太のものと交換し,新たに「腱次」と名づけた
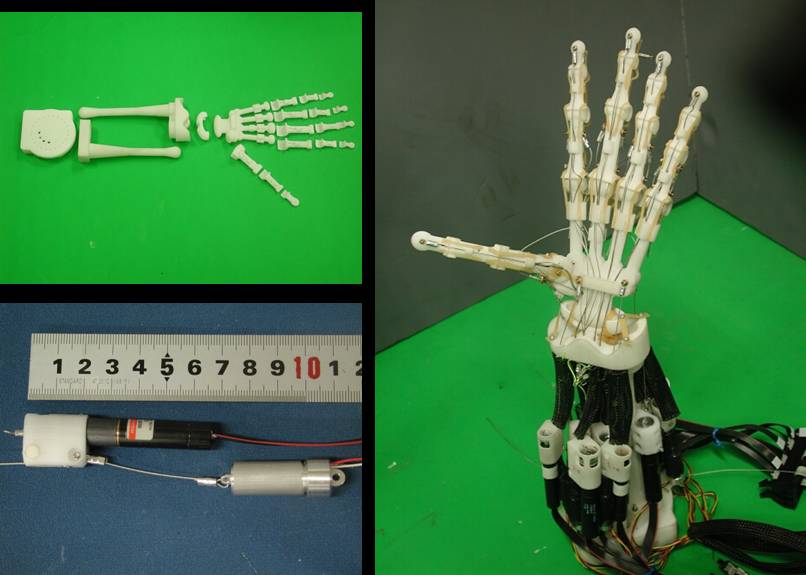
各指4自由度,手首2自由度,撓骨・尺骨機構による回転1自由度の計23自由度を左下図のような筋駆動ユニットで引く構造となっている.筋駆動ユニットはアクチュエータ,プーリ系,張力センサから構成されており,片腕最大20本まで配置可能.タスクに応じて筋配置を自由に変更させることを目指した.
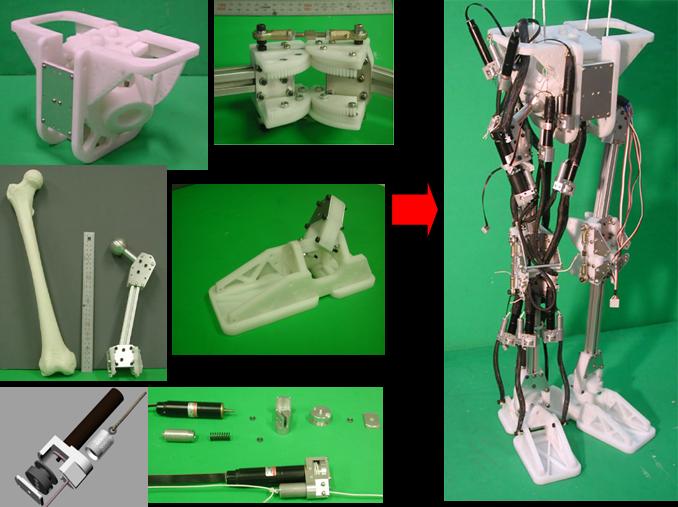
腱太の脚部は自力で立位動作を行うにはパワーが足りないという問題点があったため,よりダイナミックな動作を実現可能な腰脚部として設計・開発された.片脚あたり股関節3自由度,膝1自由度,足首2自由度の計6自由度を再配置可能な筋駆動ユニットによって駆動していた.片脚あたり最大18本の筋で駆動可能であり,腰脚部単体で屈伸や自転車漕ぎなどの動作実験を行ってきている.
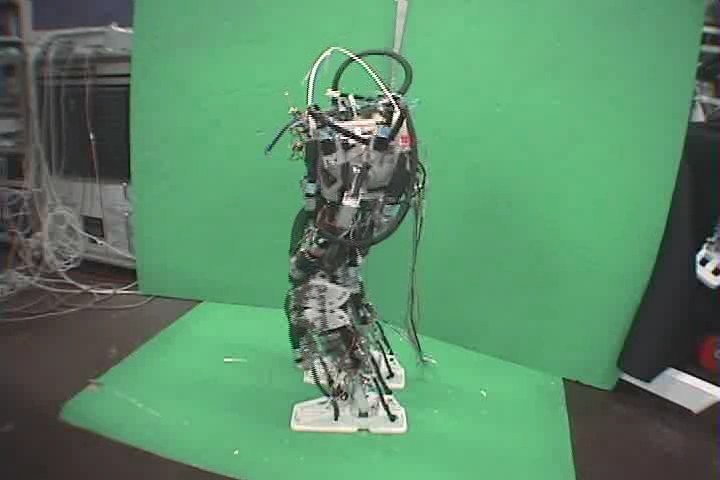

筋配置可変な構造を採用することで,実験中に筋ユニットの配置・本数の変更を行うことが容易となった.左図では浅い屈伸しか実現できていないが,そのような場合でも,実験中にすぐ膝駆動のための筋ユニットの本数を増やすことによって右図のような深い屈伸を実現することが可能になっている.
全身を利用した励振運動 |
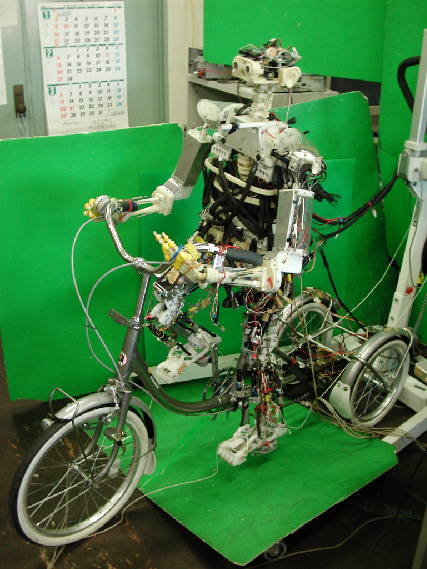
自転車こぎ |
【注意】 動画像は内部専用です.