English
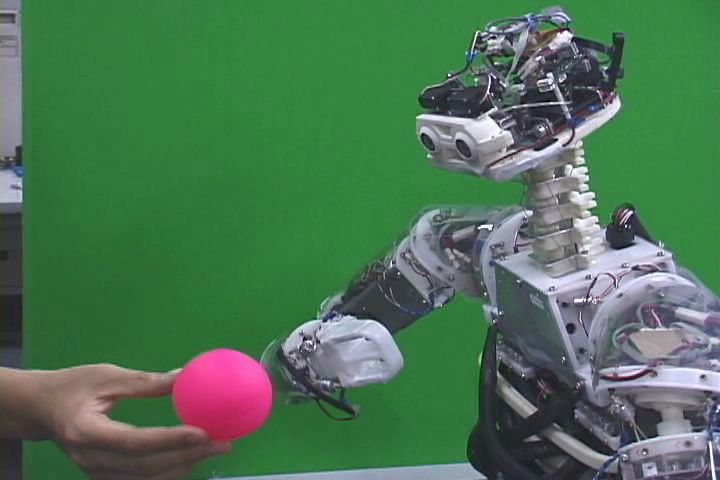
脊椎を持つ全身腱駆動型ヒューマノイド腱太
- 目的
- 脊椎を利用した全身行動
- 人間らしい動作
- 複雑な構造の多自由度ロボットの開発法・制御法
- 動作例
|
立位状態で即屈 |
|
| |
 |
|
| |
教示動作再生 |
|
| |
 |
|
| |
眼球首脊椎協調トラッキング |
|
| |
 |
|
参考文献
- 稲葉 雅幸, 長嶋 功一, 水内 郁夫, 但馬 竜介, 吉海 智晃, 國吉 康夫, 井上 博允: “脊椎を持つ全身腱駆動ヒューマノイド「腱太」の開発 --- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その1) ---”, 第19回日本ロボット学会学術講演会予稿集, pp.775--776, 2001
- 水内 郁夫, 稲葉 雅幸, 長嶋 功一, 但馬 竜介, 吉海 智晃, 國吉 康夫, 井上 博允: “全身型ヒューマノイドの多自由度柔軟脊椎構造の設計と制御 --- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その2) ---”, 第19回日本ロボット学会学術講演会予稿集, pp.777--778, 2001
- 但馬 竜介, 水内 郁夫, 吉海 智晃, 長嶋 功一, 國吉 康夫, 稲葉 雅幸, 井上 博允: “球面ジョイントを用いたヒューマノイドの四肢構造 --- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その3) ---”, 第19回日本ロボット学会学術講演会予稿集, pp.779--780, 2001
- 吉海 智晃, 稲葉 雅幸, 水内 郁夫, 但馬 竜介, 長嶋 功一, 和井田 寛則, 國吉 康夫, 井上 博允: “脊椎を持つヒューマノイドにおける頭部構造と注視制御 --- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その4) ---”, 第19回日本ロボット学会学術講演会予稿集, pp.781--782, 2001
- 稲葉 雅幸, 水内 郁夫, 但馬 竜介, 吉海 智晃, 長嶋 功一, 和井田 寛則, 國吉 康夫, 井上 博允: “介護動作の訓練に利用可能なヒューマノイドの身体応答調節機能の研究 --- 脊椎を持つ全身腱駆動ヒューマノイド「腱太」 (その5) ---”, 第19回日本ロボット学会学術講演会予稿集, pp.783--784,2001
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Koichi Nagashima, and Hirochika Inoue: ``Building Spined Muscle-Tendon Humanoid'', Proceedings of International Symposium on Robotics Research, 2001
- 水内 郁夫, 但馬 竜介, 長嶋 功一, 吉海 智晃, 佐藤 大輔, 稲葉 雅幸, 國吉 康夫, 井上 博允: ``多種入出力を持つ全身腱駆動脊椎ヒューマノイド腱太のための拡張可能な通信システム構成'', 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 1P1-F02, 2002
- 吉海 智晃, 佐藤 大輔, 但馬 竜介, 水内 郁夫, 國吉 康夫, 稲葉 雅幸, 井上 博允: ``ヒューマノイド腱太における随意・反射・状況反応行動の統合による適応性の実現'', 日本機械学会ロボティクス・メカトロニクス講演会'02講演論文集, 2P2-L06, 2002
- Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, Masayuki Inaba, Yasuo Kuniyoshi, and Hirochika Inoue: "The Design and Control of the Flexible Spine of a Fully Tendon-Driven Humanoid ``Kenta''", Proceedings of the 2002 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.2527--2532, 2002
- 佐藤 大輔, 水内 郁夫, 吉海 智晃, 稲葉 雅幸, 井上 博允: ``感覚情報を持つロボットによる人間の意図認識動作システム'', 日本ロボット学会創立20周年記念学術講演会講演論文集, 3G19, 2002
- 吉海 智晃, 水内 郁夫, 佐藤 大輔, 吉田 成徳, 稲葉 雅幸, 井上 博允: ``ヒューマノイド腱太の模倣行動における随意・反射行動の統合'', 日本ロボット学会創立20周年記念学術講演会講演論文集,1C36, 2002
- 水内 郁夫, 吉海 智晃, 佐藤 大輔, 吉田 成徳, 稲葉 雅幸, 井上 博允: ``脊椎を持つ全身腱駆動ヒューマノイド腱太によるブランコ動作'', 日本ロボット学会創立20周年記念学術講演会講演論文集,1C38, 2002
- Masayuki Inaba, Ikuo Mizuuchi, Ryosuke Tajima, Tomoaki Yoshikai, Daisuke Sato, Koichi Nagashima, and Hirochika Inoue: ``Building Spined Mustle-Tendon Humanoid'', Robotics Research: The Tenth International Symposium,pp.113--130, Springer Verlag, 2002
- 吉海 智晃, 水内 郁夫, 稲葉 雅幸, 井上 博允: ``聴覚反応行動のための音情報処理系の構築と腱太における実装'', 日本機械学会ロボティクス・メカトロニクス講演会'03講演論文集, 2A1-1F-E4, 2003
- Tomoaki Yoshikai, Ikuo Mizuuchi, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue: "Behavior System Design and Implementation in Spined Musle-Tendon Humanoid 'Kenta'", Journal of Robotics and Mechatronics, Vol.15, No.2, pp.143--152, 2003
- Tomoaki Yoshikai, Shigenori Yoshida, Ikuo Mizuuchi, Daisuke Sato, Masayuki Inaba, and Hirochika Inoue: ``Multi-sensor guided behaviors in whole body tendon-driven humanoid Kenta'', Proceedings of the 2003 IEEE Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI), pp.9-14-, 2003
- Ikuo Mizuuchi, Tomoaki Yoshikai, Daisuke Sato, Shigenori Yoshida, Masayuki Inaba, and Hirochika Inoue: ``Behavior Developing Environment for the Large-DOF Muscle-driven Humanoid Equipped with Numerous Sensors'', In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, pp.1940--1945, 2003
- 吉海 智晃, 水内 郁夫, 稲葉 雅幸, 井上 博允: ``連続タスクにおける強化学習手法を用いたヒューマノイドKentaの型模倣行動獲得'', 第21回日本ロボット学会学術講演会講演論文集, 2A28, 2003
- 水内 郁夫, 中西 雄飛, 吉海 智晃, 稲葉 雅幸, 井上 博允: ``冗長筋骨格型ヒューマノイドの身体情報を獲得するソフトウェアシステム'', 第21回日本ロボット学会学術講演会講演論文集, 1C2a, 2003
- 水内 郁夫, 和井田 博則, 中西 雄飛, 吉海 智晃, 稲葉 雅幸, 井上 博允: ``筋の追加・配置変更が容易な人間規範筋骨格型ロボットの腰脚部'', 第21回日本ロボット学会学術講演会講演論文集, 1C29, 2003
- 水内 郁夫, 吉海 智晃, 吉田 成徳, 中西 雄飛, 大竹 智尚, 稲葉 雅幸, 井上 博允: ``複雑な身体構造のロボットの情報システムの研究``, 第21回日本ロボット学会学術講演会講演論文集, 3H33, 2003
【注意】 動画像は内部専用です.
戻る