
知能ロボット行動実現システム環境
瞬発力を備えたロボットを実現するために,大出力を発生させられる モータドライバとその電源システム,冷却システム,ノイズに強い 体内通信システムの研究開発を行っている.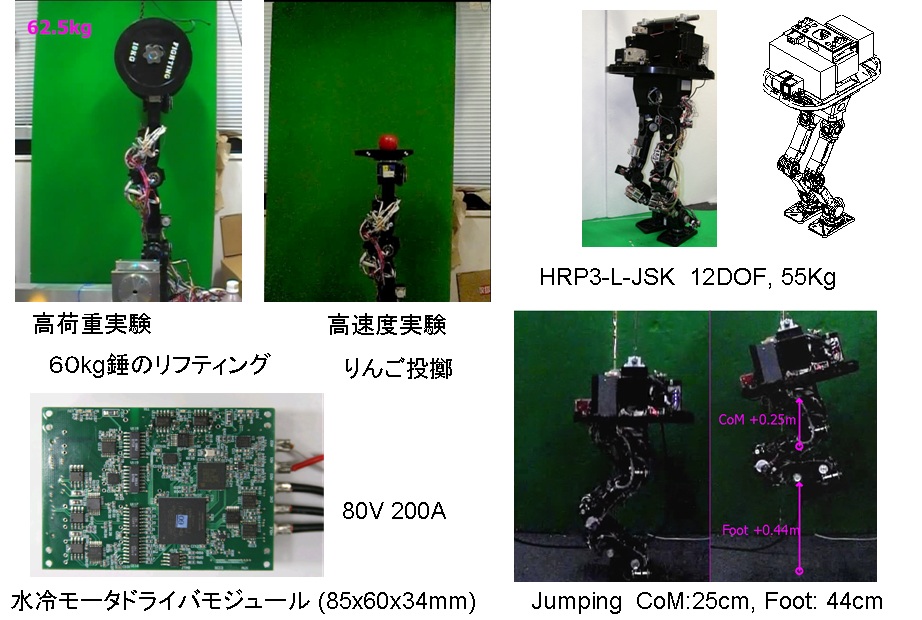
- 参考文献
- Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Design of High Torque and High Speed leg Module for High Power Humanoid, in Proceedings of The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.4497--4502, 2010.
- 浦田 順一, 中西 雄飛, 岡田 慧, 稲葉 雅幸: 高速・高トルク動作のための大出力2脚ロボットの開発, 日本ロボット学会誌, Vol.28, No.7,pp.91-97, 2010.
 までお願いします.
までお願いします.