|
|
|
|
 研究概要
研究概要
|
|
|
実世界における等身大ヒューマノイドの自律作業を補助するため,
手袋型のウェアラブルインタフェースの開発を行った.
このシステムは操作者の手先・足先の腰からの相対位置,
指部曲げ角度を取得し,ヒューマノイドに反映させることが
可能であり,操作者がヒューマノイドに成り代わったかのような
感覚で操縦を行うことが可能である.
また,音声認識によりセンサ情報の利用手法の
有無等を切り替えることが可能である.
|
|
|
|
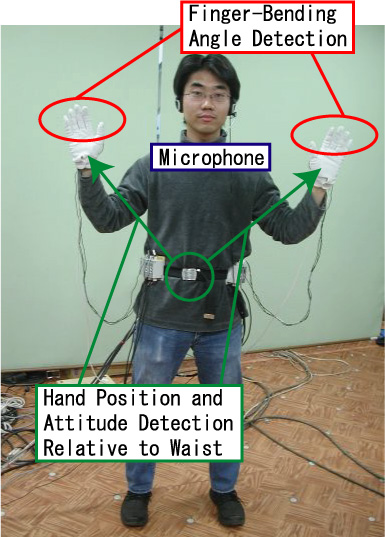
手袋型操縦インタフェース
|
|
|
ムービー
|
|
- ウェアラブルコントローラを用いた歩行中の物体把持動作生成[mpg]
|
|
|
参考文献
|
|
- ヒューマノイドの手先主導型操縦のための手袋型操作デバイスの開発
神崎秀, 福本康隆, 西脇光一, 稲葉雅幸, 井上博允
日本機械学会ロボティクス・メカトロニクス講演会, 名城大学, 2004.6.
- Development of Wearable Controller with Gloves and Voice Interface for Humanoids' Whole-body Motion Generation
Shigeru KANZAKI, Yasutaka FUKUMOTO, Koich NISHIWAKI, Tetsunari INAMURA, Masayuki INABA, Hirochika INOUE
International Conference on Machine Automation, Osaka University, 2004.11.
|

 までお願いします。
までお願いします。