|
|
|
|
 Research summary
Research summary
|
|
|
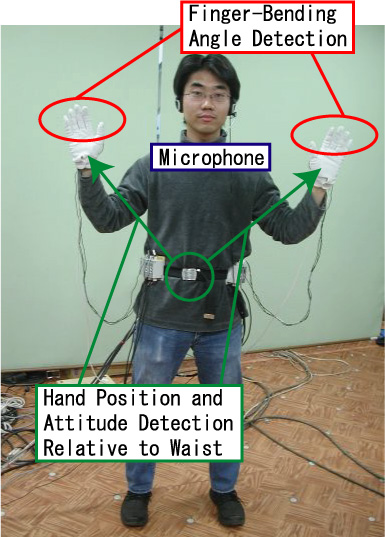
In order to assist life-sized humanoid robots operating autonomously
in the real world, we have developed gloves that can act as a wearable
interface. It uses the relative distance of the operator's hands and
feet from his waist and the bend of his fingers to influence the
humanoid's actions. In this way, the human can sometimes take place of
the robot's control system for performing tasks.
The wearer can also change the control system by sound, which is
picked up by auditory sensors in the gloves.
|
|
|
|
Glove-Controlled Interface
|
|
|
Movies
|
|
- Picking up an object while walking, as controlled by the
wearable controller [mpg]
|
|
|
References
|
|
- ヒューマノイドの手先主導型操縦のための手袋型操作デバイスの開発
神崎秀, 福本康隆, 西脇光一, 稲葉雅幸, 井上博允
日本機械学会ロボティクス・メカトロニクス講演会, 名城大学, 2004.6.
- Development of Wearable Controller with Gloves and Voice Interface for Humanoids' Whole-body Motion Generation
Shigeru KANZAKI, Yasutaka FUKUMOTO, Koich NISHIWAKI, Tetsunari INAMURA, Masayuki INABA, Hirochika INOUE
International Conference on Machine Automation, Osaka University, 2004.11.
|

