|
|
|
|
 研究概要
研究概要
|
|
|
H7は機構上の特徴として,並列支持機構を持つ足裏6軸力センサ,
足部のつま先自由度,様々な物体を把持できかつ大きな把持力を
発生させることが可能なハンド等が挙げられる.
並列支持機構を持つ足裏6軸力センサにより,大きな衝撃力を
受ける足裏においても6軸力計測を可能とし,
歩行時の安定化指標となるZMPの正確な算出を可能にする.
つま先自由度は,脚部の逆運動学解空間を拡大し,歩行時の
歩幅の拡大,高い段差の昇段を可能にするなどの効果がある.
腕部は2004年度に改造を行い,腕部に7自由度,ハンドに3自由度を有す
機構となった.双腕での物体操作や鉄棒へのぶら下がり等を実現した.
|
|
|
|
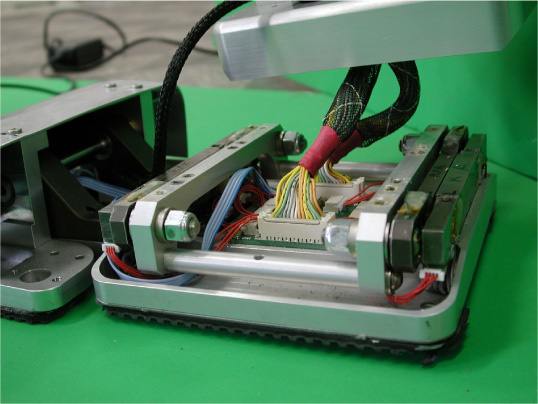
H7の足裏6軸力センサ
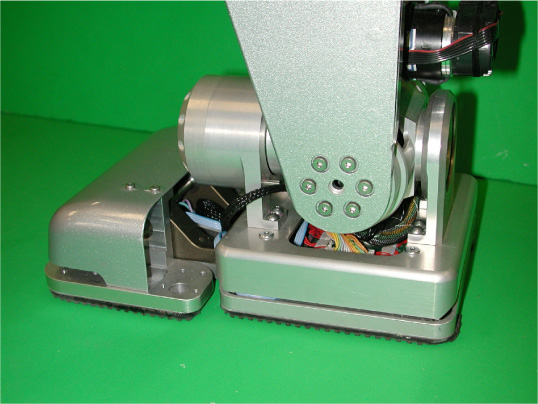
つま先を持つH7の足裏部
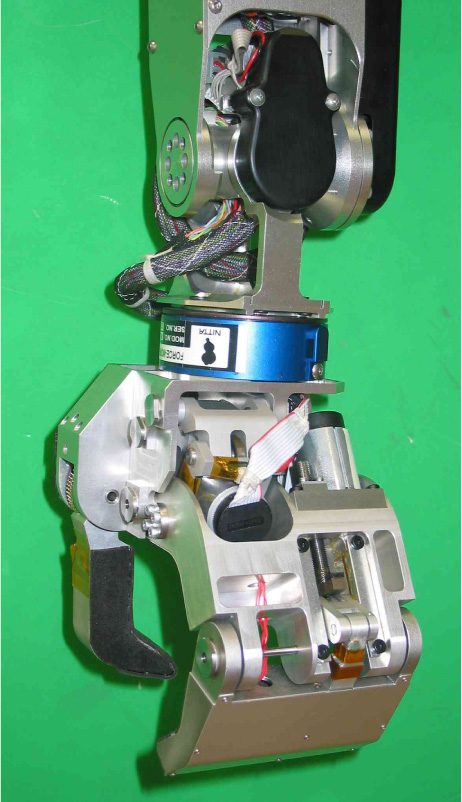
腕部7自由度・指部3自由度を有するハンド
|
|
|
ムービー
|
|
- 並列支持機構を持つ足裏6軸力センサによる人間の運動時の足裏力測定[mpg]
- つま先を利用した階段昇段動作[mpg]
|
|
|
参考文献
|
|
- つま先自由度を活用した人間型ロボットの歩行・全身運動能力拡大
西脇 光一, 村上 好文, 杉原 知道, 加賀美 聡, 稲葉 雅幸, 井上 博允
第6回ロボティクスシンポジア予稿集, pp. 113--118., 2001 年, 3 月
- 人間型ロボットの床反力計測のための並列支持機構を持つ6軸力センサ
西脇 光一, 村上 好文, 加賀美 聡, 稲葉 雅幸, 井上 博允
第6回ロボティクスシンポジア予稿集, pp. 131--136., 2001 年, 3 月
- 並列支持機構を持つ人間型ロボット用6軸力センサの非干渉化構造の研究
村上 好文,西脇 光一,加賀美 聡,國吉 康夫,稲葉 雅幸,井上 博允
第19回日本ロボット学会学術講演会講演論文集, pp. 103--104., 2001 年, 9 月
- Toe Joints that Enhance Bipedal and Fullbody Motion of Humanoid Robots
Koichi Nishiwaki, Satoshi Kagami, Yasuo Kuniyoshi, Masayuki Inaba, Hirochika Inoue
Proceedings of the 2002 IEEE International Conference on Robotics & Automation (ICRA02),
Washington, DC, pp. 3105--3110., May., 2002
- A Six-axis Force Sensor with Parallel Support Mechanism to Measure the Ground Reaction Force of Humanoid Robot
Koichi Nishiwaki, Yoshifumi Murakami, Satoshi Kagami, Yasuo Kuniyoshi, Masayuki Inaba, Hirochika Inoue
Proceedings of the 2002 IEEE International Conference on Robotics & Automation (ICRA02),
Washington, DC, pp. 2277-2282., May., 2002
- 等身大ヒューマノイド「H7」のための実環境行動用ハンドの開発
西脇 光一,神崎 秀,加賀美 聡,稲葉 雅幸,井上 博允
第9回ロボティクスシンポジア予稿集,pp.494--496., 2004年.
|

 までお願いします。
までお願いします。