|
|
|
Humanoid Robot H7's Body Structure
|
| Category: H7 |
H7 TOP
|
|
|
|
|
 Research Summary
Research Summary
|
|
|
The H7 has six-axis force sensors in the soles of its feet that
provide a parallel support mechanism, and it also has a degree of freedom in
the tips of its feet. Its hands have a strong grasping ability
that allows it to pick up a variety of objects.
The six-axis force sensors allow the H7's feet to still measure force
even when presented with a strong impact, and it can accurately
calculate a stability index while walking, as ZMP.
The extra degree of freedom in the H7's toe area enlarges the area of
reverse kinematics in which the leg can move, meaning a broader step
and a higher range of climbing.
The arms were remodeled in 2004, giving each seven degrees of freedom,
and three degrees of freedom in each hand. The H7's hands can adeptly
manipulate objects, such as dangling metal rods, and other tasks.
|
|
|
|
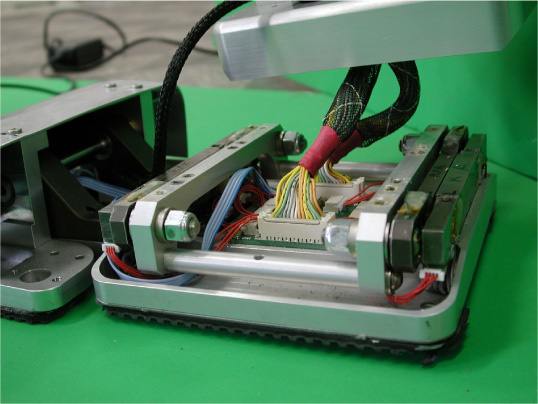
The six-axis force sensors on H7's soles
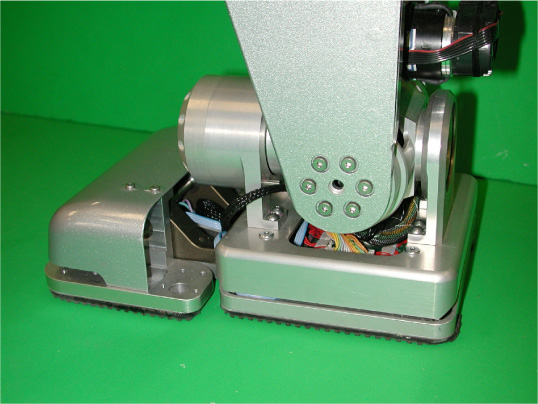
The degree of freedom in the toe reigon
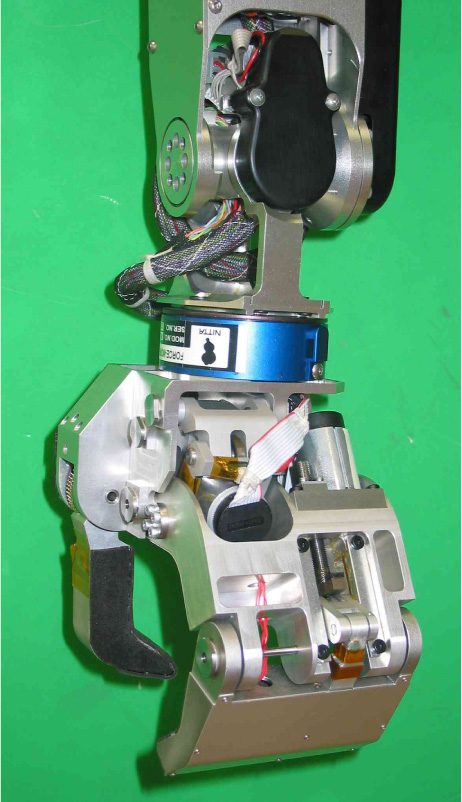
7 DOF arm with its 3 DOF hand
|
|
|
Movies
|
|
- Measurement of movement in the sole of the foot,
using the parallel support 6-axis force sensors [mpg]
- Climbing stairs using the toe joint [mpg]
|
|
|
References
|
|
- つま先自由度を活用した人間型ロボットの歩行・全身運動能力拡大
西脇 光一, 村上 好文, 杉原 知道, 加賀美 聡, 稲葉 雅幸, 井上 博允
第6回ロボティクスシンポジア予稿集, pp. 113--118., 2001 年, 3 月
- 人間型ロボットの床反力計測のための並列支持機構を持つ6軸力センサ
西脇 光一, 村上 好文, 加賀美 聡, 稲葉 雅幸, 井上 博允
第6回ロボティクスシンポジア予稿集, pp. 131--136., 2001 年, 3 月
- 並列支持機構を持つ人間型ロボット用6軸力センサの非干渉化構造の研究
村上 好文,西脇 光一,加賀美 聡,國吉 康夫,稲葉 雅幸,井上 博允
第19回日本ロボット学会学術講演会講演論文集, pp. 103--104., 2001 年, 9 月
- Toe Joints that Enhance Bipedal and Fullbody Motion of Humanoid Robots
Koichi Nishiwaki, Satoshi Kagami, Yasuo Kuniyoshi, Masayuki Inaba, Hirochika Inoue
Proceedings of the 2002 IEEE International Conference on Robotics & Automation (ICRA02),
Washington, DC, pp. 3105--3110., May., 2002
- A Six-axis Force Sensor with Parallel Support Mechanism to Measure the Ground Reaction Force of Humanoid Robot
Koichi Nishiwaki, Yoshifumi Murakami, Satoshi Kagami, Yasuo Kuniyoshi, Masayuki Inaba, Hirochika Inoue
Proceedings of the 2002 IEEE International Conference on Robotics & Automation (ICRA02),
Washington, DC, pp. 2277-2282., May., 2002
- 等身大ヒューマノイド「H7」のための実環境行動用ハンドの開発
西脇 光一,神崎 秀,加賀美 聡,稲葉 雅幸,井上 博允
第9回ロボティクスシンポジア予稿集,pp.494--496., 2004年.
|
|
|
|

