|
|
|
|
|
|
 研究概要
研究概要
|
|
|
ヒューマノイドが人間の日常生活を支援する上で,
達成すべきタスクと周囲の環境から,
自律的に知的な行動を自動生成機能は必要不可欠である.
そこで本研究室では,
3D幾何モデル世界でのヒューマノイドのモーションプランニングによって,
全身の自由度数が高いヒューマノイドの特徴を生かした
「対象物体の操作・力学的安定性を考慮した全身行動」を自動生成する研究を行ってきた.
これまでに行われてきた研究としては,
以下のようなものが挙げられる.
- 操作対象物体の軌道から,
ヒューマノイドの全身動作を生成する研究
- シミュレータ内の3D幾何モデル世界
におけるヒューマノイドの可動障害物操作計画
|
|
|
|
|
ムービー(準備中)
|
|
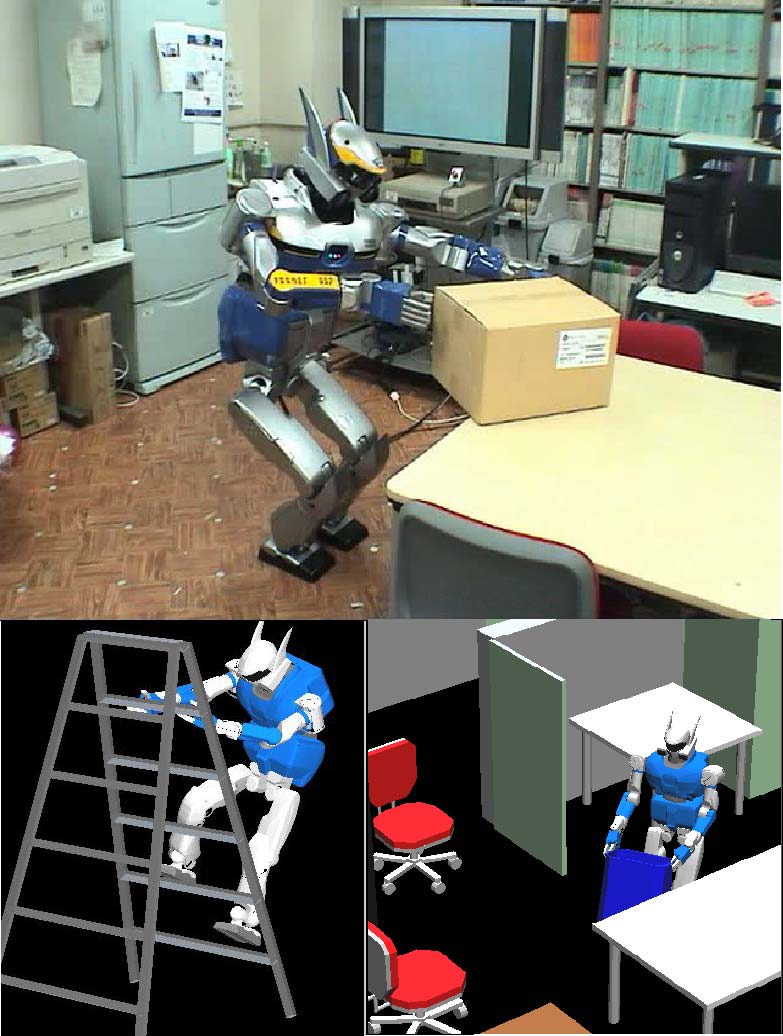
- 操作対象物体の軌道を元に生成された, 全身による段ボール操作行動
- シミュレータ内で,可動障害物をどけながら移動するヒューマノイド
|
|
|
参考文献
|
|
- 岡田 慧, 中井 博之, 稲葉 雅幸, 井上 博允 :
"対象物軌道の記述に基づいたヒューマノイドの全身動作生成法と物体運搬行動の実現",
第22回ロボット学会学術講演会予稿集, pp 1K12, 2004.
- Kei Okada, Atsushi Haneda, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue:
"Environment Manipulation Planner for Humanoid Robots Using Task Graph That Generates Action Sequence",
Proc. of the IEEE International Conference on Robotics and Automation, 1174-1179, 2004.
- Kei Okada, Takashi Ogura, Atushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue : "Integrated System Software for HRP2 Humanoid",
Proc. of International Conference on Robotics and Automation (ICRA'04), pp 3207-3212, 2004.
- 岡田 慧, 小倉 崇, 羽根田 淳, 幸坂 大輔, 中井 博之, 稲葉 雅幸, 井上 博允 : "HRP2ヒューマノイド統合システムソフトウェア環境と行動実験",
第9回ロボティクスシンポジア予稿集, pp 392-397, 2004.
- 中井 博之, 稲葉 雅幸, 井上 博允 : "RRT-Connect Plannerを用いたロボットの全身行動生成",
日本機械学会ロボティクスメカトロニクス講演会, pp. 2P2-1F-C1, 2003.
|
|
|
|

 までお願いします。
までお願いします。