|
|
|
|
 Research Summary
Research Summary
|
|
|
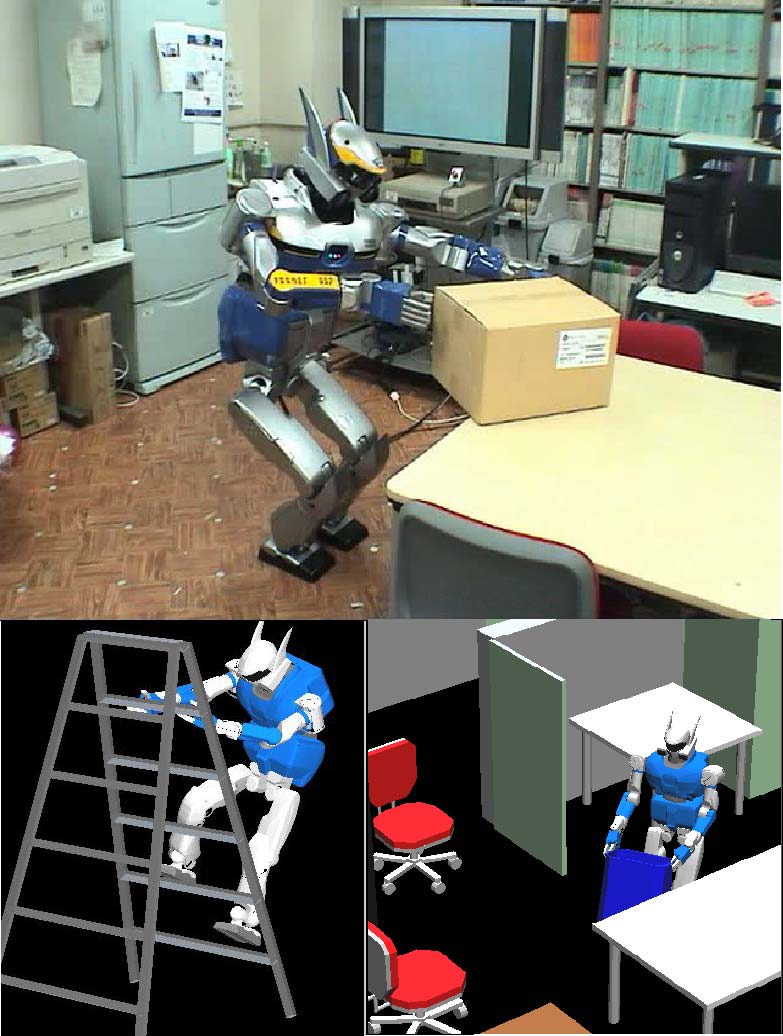
For a humanoid robot to assist with human daily life, it is essential that it be able to automatically create intelligent behaviors based on its surrounding environment and its task goal.
With that in mind, our laboratory conducts research on creating an automatic movement generation system that uses the humanoid robot's high degrees of freedom throughout its body to perform motion planning through a three-dimensional model world, manipulate objects, and maintain mechanical stability.
Our current research includes the following topics:
- Robot movement planning based on the trajectory of the object of manipulation
- Obstacle avoidance planning based on a 3D world model simulation
|
|
|
|
|
Movies (Under construction)
|
|
- Full-body manipulation of a cardboard box based on box trajectory
- Obstacle avoidance while transversing a simulated area
|
|
|
References
|
|
- Kei Okada, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue:
Motion Generation of Humanoids based on Object Trajectory Description,
in The 22th Annual Conference on Robotics Society of Japan, 1K12, 2004.
- Kei Okada, Atsushi Haneda, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue:
"Environment Manipulation Planner for Humanoid Robots Using Task Graph That Generates Action Sequence",
Proc. of the IEEE International Conference on Robotics and Automation, 1174-1179, 2004.
- Kei Okada, Takashi Ogura, Atushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue : "Integrated System Software for HRP2 Humanoid",
Proc. of International Conference on Robotics and Automation (ICRA'04), pp 3207-3212, 2004.
- Kei Okada, Takashi Ogura, Atsushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue:
System Software Integration on HRP2 Humanoid and Behavior Execution,
in Proceedings of The 9th Robotics Symposia, pp.392--397, 2004
- H. Nakai, M. Inaba, and H. Inoue. Whole Body Mo-
tion Generator of Robots using RRT-Connect Planner.
In Proceedings of 2003 Annual Symposium of Robotics-
Mechatronics (ROBOMEC '03), pages 2P2-1F-C1, 2003 (in
Japanese).
|