|
|
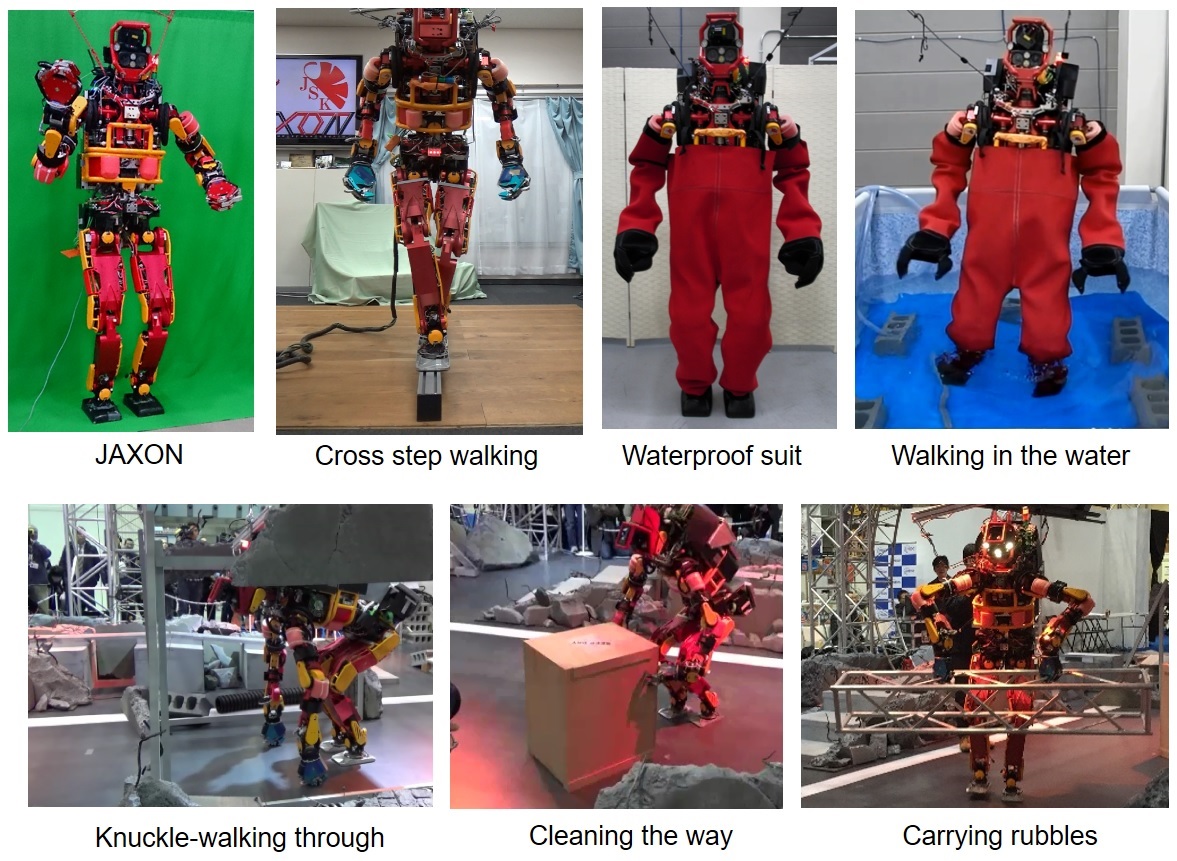
High Power Humanoid Platform JAXON
- Papers
-
Yohei Kakiuchi, Kunio Kojima, Eisoku Kuroiwa, Masaki Murooka, Shintaro Noda, Iori Kumagai, Ryohei Ueda, Fumihito Sugai, Shunichi Nozawa, Kei Okada, Masayuki Inaba:
Development of Humanoid Robot System for Disaster Response Through Team NEDO-JSK's Approach to DARPA Robotics Challenge Finals,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.805--810, 2015.
-
Shunichi Nozawa, Eisoku Kuroiwa, Kunio Kojima, Ryohei Ueda, Masaki Murooka, Shintaro Noda, Iori Kumagai, Yu Ohara, Yohei Kakiuchi, Kei Okadad, Masayuki Inaba:
Multi-Layered Real-Time Controllers for Humanoid's Manipulation and Locomotion Tasks with Emergency Stop,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.381--388, 2015.
-
Ryohei Ueda, Masaki Murooka , Yu Ohara , Iori Kumagai , Ryo Terasawa , Yuki Furuta , Kunio Kojima , Tatsuhi Karasawa , Fumihito Sugai , Satoshi Iwaishi , Shunichi Nozawa , Yohei Kakiuchi , Kei Okada , Masayuki Inaba:
Humanoid Integrated UI System for Supervised Autonomy with Massive Data Visualization over Narrow and Unreliable Network Communication for DRC Competition,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.797--804, 2015.
-
Iori Kumagai , Ryo Terasawa , Shintaro Noda, Ryohei Ueda, Shunichi Nozawa , Yohei Kakiuchi , Kei Okada , Masayuki Inaba:
Achievement of Recognition Guided Teleoperation Driving System for Humanoid Robots with Vehicle Path Estimation,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.670--675, 2015.
-
Kunio Kojima, Tatsuhi Karasawa, Toyotaka Kozuki, Eisoku Kuroiwa, Sou Yukizaki, Satoshi Iwaishi, Tatsuya Ishikawa, Ryo Koyama, Shintaro Noda, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Development of Life-Sized High-Power Humanoid Robot JAXON for Real-World Use,
in Proceedings of the 2015 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2015), pp.838--843, 2015.
-
Yuta Kojio, Tatsushi Karasawa, Kunio Kojima, Ryo Koyama, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Walking Control in Water Considering Reaction Forces from Water for Humanoid Robots with a Waterproof Suit,
in Proceedings of The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, pp.658-665, 2016.
-
Ryo Terasawa, Shintaro Noda, Kunio Kojima, Ryo Koyama, Fumihito Sugai, Shunichi Nozawa, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Achievement of Dynamic Tennis Swing Motion by Offline Motion Planning and Online Trajectory Modification Based on Optimization with a Humanoid Robot,
in Proceedings of the 2016 IEEE-RAS International Conference on Humanoid Robots (Humanoids 2016), pp.1094--1100, 2016.
|
|
|