|
|
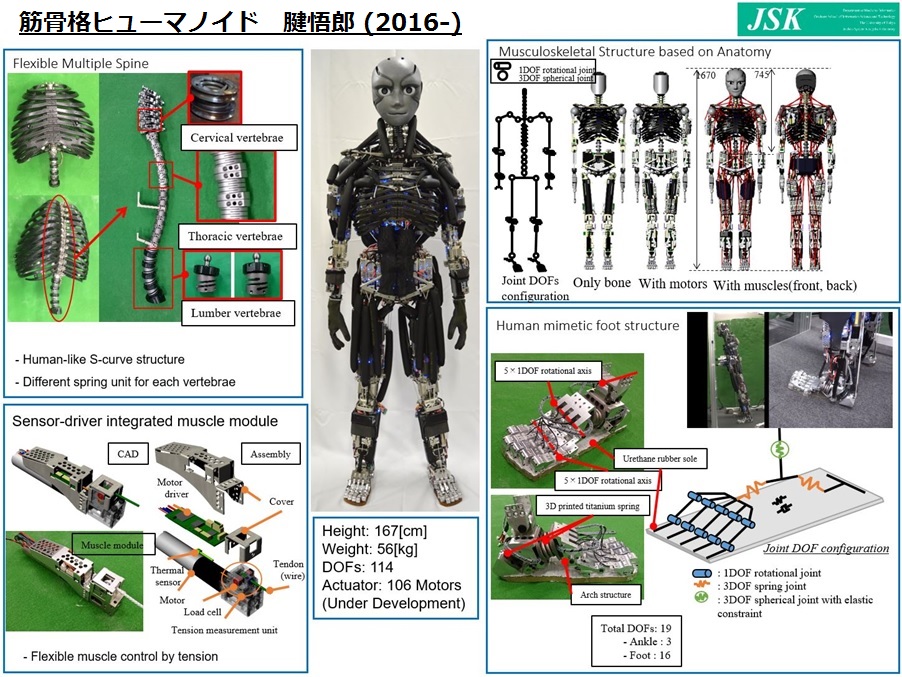
腱悟郎:人体模倣筋骨格ヒューマノイド
- Papers
- Yuki Asano, Shinsuke Nakashima, Toyotaka Kozuki, Soichi
Ookubo, Iori Yanokura, Youhei Kakiuchi, Kei Okada, Masayuki Inaba:
Human Mimetic Foot Structure with Multi-DOFs and Multi-sensors for
Musculoskeletal Humanoid Kengoro, in Proceedings of The 2016 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.2419-2424, 2016.
- Toyotaka Kozuki, Hirose Toshinori, Takuma Shirai, Shinske
Nakashima, Yuki Asano, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Skeletal Structure with Artificial Perspiration for Cooling by Latent
Heat for Musculoskeletal Humanoid Kengoro, in Proceedings of The 2016
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2135-2140, 2016.
- Yuki ASANO, Toyotaka KOZUKI, Soichi OOKUBO, Masaya KAWAMURA,
Iori YANOKURA, Shinsuke NAKASHIMA, Takeshi KATAYAMA, Toshinori HIROSE,
Youhei KAKIUCHI, Kei OKADA, Masayuki INABA: Human Mimetic
Musculoskeletal Humanoid Kengoro for Real World Physically Interactive
Actions, in 2016 JSME Conference on Robotics and Mechatronics,
2A1-13a2, 2016.
- 片山健, 上月豊隆, 浅野悠紀, 大久保壮一, 川村将矢, 矢野倉伊織, 垣
内洋平, 岡田慧, 稲葉雅幸: 等身大腱駆動ヒューマノイドにおける柔軟発泡素
材を用いた筋外装, in 日本機械学会ロボティクス・メカトロニクス講演会'16
講演論文集, 2A1-13a4, 2016.
- 川村将矢, 大久保壮一, 上月豊隆, 浅野悠紀, 片山健, 矢野倉伊織,
岡田慧, 稲葉雅幸: 腱駆動ヒューマノイドにおける関節剛性制御による環境接
触適応動作の実現, in 日本機械学会ロボティクス・メカトロニクス講演会'16
講演論文集, 2A1-12b7, 2016.
|
|
|

 までお願いします.
までお願いします.