|
|
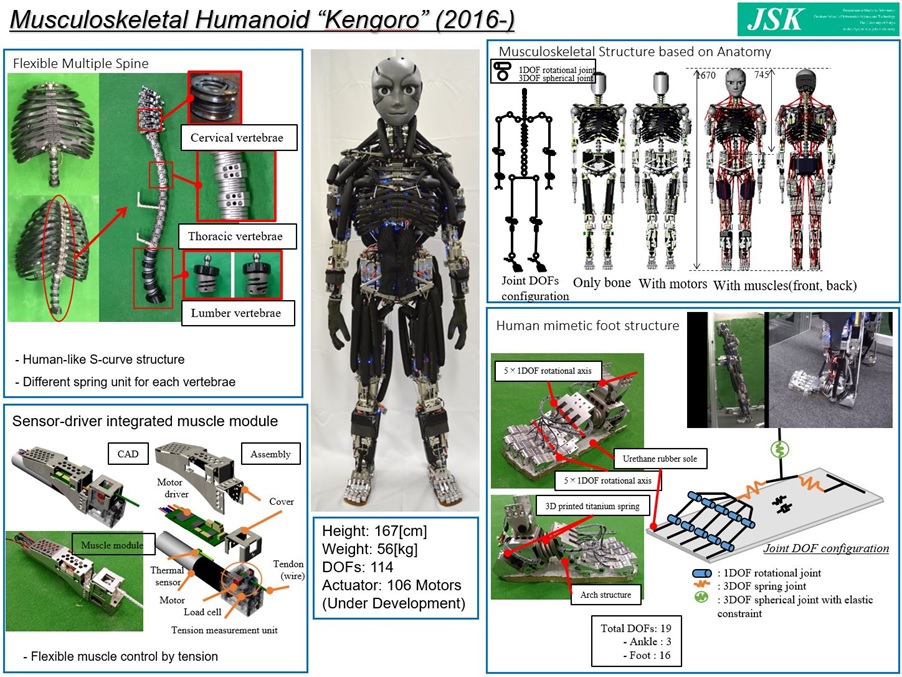
Kengoro: Human Mimetic Musculoskeletal Humanoid
- Papers
- Yuki Asano, Shinsuke Nakashima, Toyotaka Kozuki, Soichi
Ookubo, Iori Yanokura, Youhei Kakiuchi, Kei Okada, Masayuki Inaba:
Human Mimetic Foot Structure with Multi-DOFs and Multi-sensors for
Musculoskeletal Humanoid Kengoro, in Proceedings of The 2016 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.2419-2424, 2016.
- Toyotaka Kozuki, Hirose Toshinori, Takuma Shirai, Shinske
Nakashima, Yuki Asano, Yohei Kakiuchi, Kei Okada, Masayuki Inaba:
Skeletal Structure with Artificial Perspiration for Cooling by Latent
Heat for Musculoskeletal Humanoid Kengoro, in Proceedings of The 2016
IEEE/RSJ International Conference on Intelligent Robots and Systems,
pp.2135-2140, 2016.
- Yuki ASANO, Toyotaka KOZUKI, Soichi OOKUBO, Masaya KAWAMURA,
Iori YANOKURA, Shinsuke NAKASHIMA, Takeshi KATAYAMA, Toshinori HIROSE,
Youhei KAKIUCHI, Kei OKADA, Masayuki INABA: Human Mimetic
Musculoskeletal Humanoid Kengoro for Real World Physically Interactive
Actions, in 2016 JSME Conference on Robotics and Mechatronics,
2A1-13a2, 2016.
- Takeshi Katayama, Toyotaka Kozuki, Yuki Asano, Soichi Okubo,
Iori Yanokura, Masaya Kawamura Yohei Kakiuchi, Kei Okada, Masayuki
Inaba: Flexible Foam Muscle Exterior for Life-sized Tendon driven
Humanoid, in 2016 JSME Conference on Robotics and Mechatronics,
2A1-13a4, 2016.
- Masaya KAWAMURA, Soichi OOKUBO, Toyotaka KOZUKI, Yuki ASANO,
Takeshi KATAYAMA, Iori YANOKURA, Kei OKADA, Masayuki INABA:
Realization of Adaptive Contact Motion with Joint-Level Stiffness
Control of Tendon Driven Humanoid, in 2016 JSME Conference on Robotics
and Mechatronics, 2A1-12b7, 2016.
|
|
|