|
|
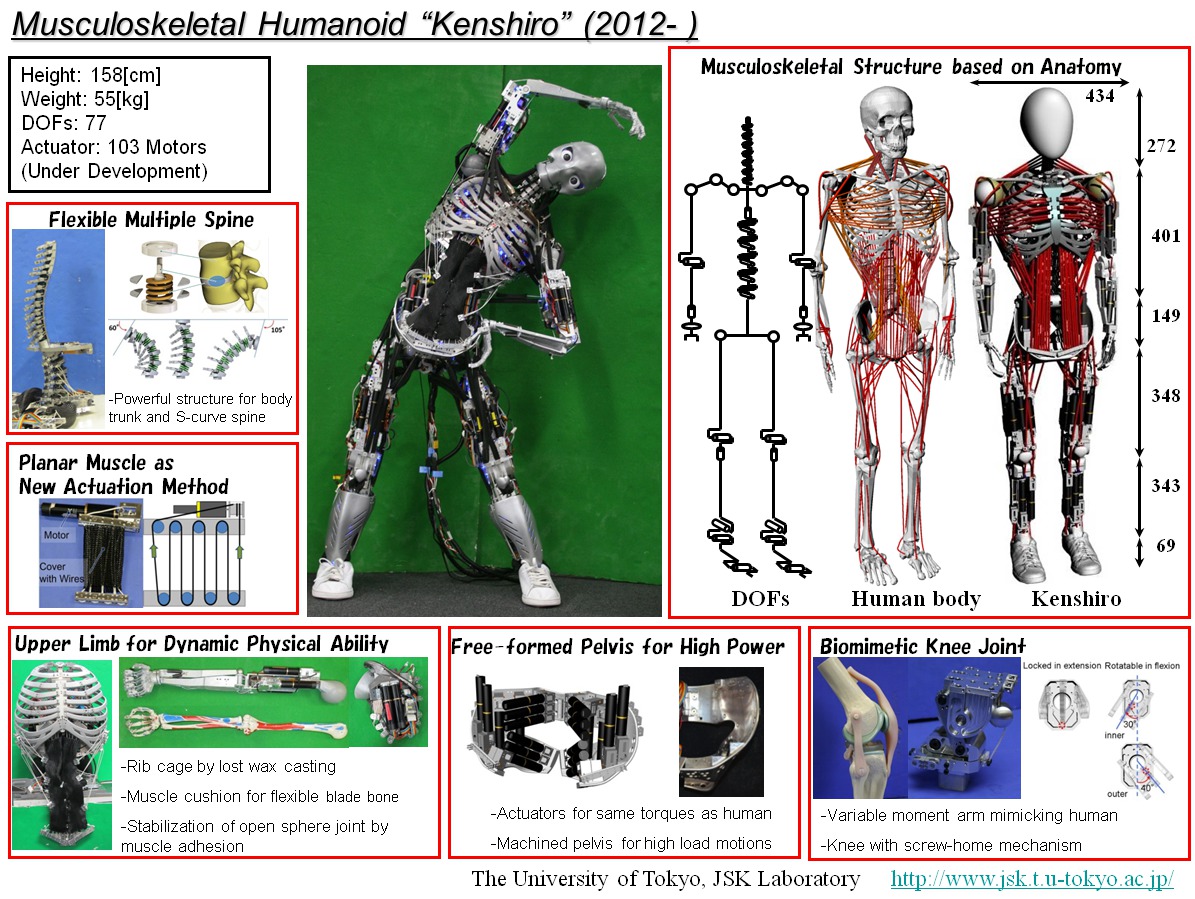
Kenshiro: Human Mimetic Musculoskeletal Humanoid
- Papers
- Yuki Asano, Hironori Mizoguchi, Toyotaka Kozuki, Yotaro
Motegi, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki
Inaba: Achievement of Twist Squat by Musculoskeletal Humanoid
with Screw-Home Mechanism, in Proceedings of The 201 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.4649-4654, 2013.
- Yuki Asano, Takuma Shirai, Toyotaka Kozuki, Yotaro Motegi,
Yuto Nakanishi, Kei Okada, Masayuki Inaba: Motion Generation of
Redundant Musculoskeletal Humanoid Based on Robot-Model Error
Compensation by Muscle Load Sharing and Interactive Control
Device, in Proceedings of the 2013 IEEE-RAS International
Conference on Humanoid Robots (Humanoids 2013), pp.336-341,
2013.
-
Yuto Nakanishi, Yuki Asano, Toyotaka Kozuki, Hironori Mizoguchi,
Yotaro Motegi, Masahiko Osada, Takuma Shirai, Junichi Urata, Kei
Okada, Masayuki Inaba: Design Concept of Detail Musculoskeletal
Humanoid "Kenshiro" -Toward a real human body musculoskeletal
simulator-, in Proceedings of the 2012 IEEE-RAS International
Conference on Humanoid Robots (Humanoids 2012), pp.1-6, 2012.
- Yuki Asano, Hironori Mizoguchi, Toyotaka Kozuki Yotaro Motegi,
Masahiko Osada, Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki
Inaba: Lower Thigh Design of Detailed Musculoskeletal Humanoid
``Kenshiro'', in Proceedings of The 2012 IEEE/RSJ International
Conference on Intelligent Robots and Systems, pp.4367-4372,
2012.
- Toyotaka Kozuki, Hironori Mizoguchi, Yuki Asano, Masahiko
Osada, Takuma Shirai, Junichi Urata, Yuto Nakanishi, Kei Okada,
Masayuki Inaba:
Design Methodology for Thorax and Shoulder of Human Mimetic
Musculoskeletal Humanoid Kenshiro - A Thorax with Rib like Surface-,
in Proceedings of The 2012 IEEE/RSJ International Conference on
Intelligent Robots and Systems, pp.4367-4372, 2012.
- Yotaro Motegi, Takuma Shirai, Tamon Izawa, Tomoko Kurotobi,
Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba: Motion
Control Based on Modification of the Jacobian Map between the
Muscle Space and Work Space with Musculoskeletal Humanoid, in
Proceedings of the 2012 IEEE-RAS International Conference on
Humanoid Robots (Humanoids 2012), pp.835--840, 2012.
- Masahiko Osada, Hironori Mizoguchi, Yuki Asano, Toyotaka Kozuki,
Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Design of Humanoid Body Trunk with "Multiple Spine Structure" and
"Planar-muscle-driven" System for Achievement of Humanlike
Powerful and Lithe Motion,in Proceedings of the 2011 IEEE
International Conference on Robotics and Biomimetics,
pp.2217-2222, 2011.
- Yuki Asano, Hironori Mizoguchi, Masahiko Osada, Toyotaka
Kozuki, Junichi Urata, Tamon Izawa, Yuto Nakanishi, Kei Okada,
Masayuki Inaba: Biomimetic Design of Musculoskeletal Humanoid Knee
Joint with Patella and Screw-Home Mechanism,inЃ Proceedings of the
2011 IEEE International Conference on Robotics and Biomimetics,
pp.1813-1818, 2011.
- Takuma Shirai, Junichi Urata, Yuto Nakanishi, Kei Okada,
Masayuki Inaba: Whole Body Adapting Behavior with Muscle Level
Stiffness Control of Tendon-Driven Multijoint Robot,inЃ Proceedings
of the 2011 IEEE International Conference on Robotics and
Biomimetics, pp.2229-2234, 2011.
- Hironori Mizoguchi, Yuki Asano, Tamon Izawa, Masahiko Osada,
Junichi Urata, Yuto Nakanishi, Kei Okada, Masayuki Inaba:
Biomimetic Design and Implementation of Muscle Arrangement around
Hip Joint for Musculoskeletal Humanoid,inЃ Proceedings of the 2011
IEEE International Conference on Robotics and Biomimetics,
pp.1819-1824, 2011.
|
|
|