|
|
Macra
- Papers
- 林摩梨花, 槙俊明, 石坂唯, 神崎秀, 吉海 智晃, 岡田 慧, 水内 郁夫,
稲葉 雅幸: 全身触覚と軟質ウレタンフォームによる肉質を有する小型人型ロボットの開発, in 第24回ロボット学会学術講演会予稿集, 2H14, 2006.
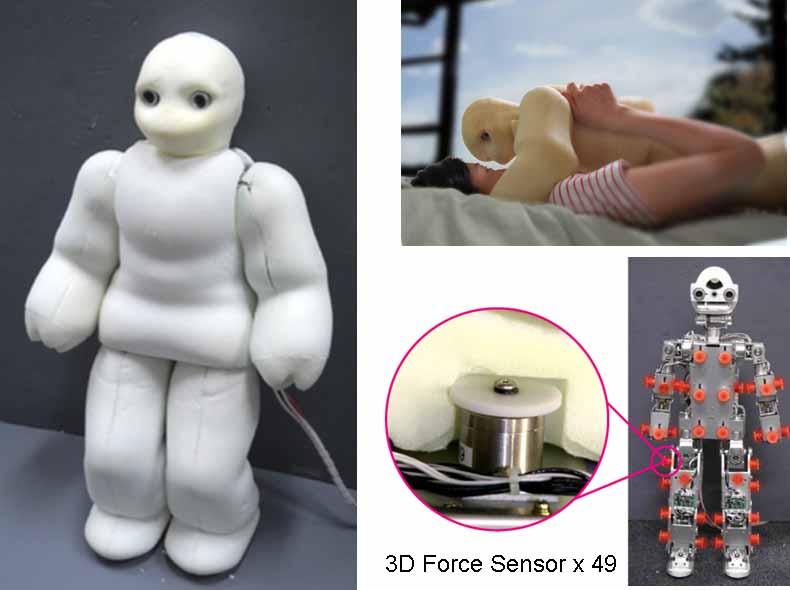
- Marika Hayashi, Takashi Sagisaka, Yui Ishizaka, Tomoaki
Yoshikai, Masayuki Inaba: Development of Functional Whole-Body Flesh
with Distributed Three-axis Force Sensors to Enable Close
Interaction by Humanoids, in Proceedings of The 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.3610--3615, 2007.
- Tomoaki Yoshikai, Marika Hayashi, Yui Ishizaka, Takashi
Sagisaka, Masayuki Inaba: Behavior Integration for Whole-body Close
Interactions by a Humanoid with Soft Sensor Flesh, in Proceedings of
the 2007 IEEE-RAS International Conference on Humanoid Robots
(Humanoids 2007), , 2007.
- 吉海智晃, 林摩梨花, 稲葉雅幸: 柔軟肉質ヒューマノイドmacraにおけ
る並列監視評価構造を用いた自律行動統合システム, in 第25回日本ロボッ
ト学会学術講演会講演論文集, 1H32, 2007.
- 林摩梨花, 鷺坂隆志, 吉海智晃, 稲葉雅幸: 全身接触行動を行うヒュー
マノイドロボットのための柔軟外装の設計評価, in 日本機械学会ロボティ
クス・メカトロニクス講演会'07 講演論文集, 1P1-H04, 2007.
- 林摩梨花, 吉海智晃, 稲葉雅幸: 発泡樹脂柔軟外装を持つヒューマノ
イドにおける全身分布三軸力センシング, in 第25回日本ロボット学会学術
講演会講演論文集, 1H31, 2007.
- 林摩梨花, 石坂唯, 植田亮平, 吉海智晃, 稲葉雅幸: 全身分布三軸力
覚センサを有する柔軟外装ロボットの密着インタラクション, in 第25回日
本ロボット学会学術講演会講演論文集, 2L13, 2007.
- 林摩梨花, 石坂唯, 植田亮平, 吉海智晃, 稲葉雅幸: 発泡体型柔軟肉
質の全身被覆分布変形感覚を備えたヒューマノイドの実現, 日本ロボット学
会誌, Vol.26, No.8, pp.67--73, 2008.
- Tomoaki Yoshikai, Takashi Sagisaka, Marika Hayashi, Masayuki
Inaba: Acquisition and Realization of a Rolling-Over Motion for a
Humanoid with Soft Sensor Flesh, Journal of Robotics and
Mechatronics, Vol.20, No.2, pp.241--249, 2008.
- Tomoaki YOSHIKAI, Marika HAYASHI, Masayuki Inaba: Simultaneous
Learning and Recalling System for Wholebody Motion of a Humanoid
with Soft Sensor Flesh, in Proceedings of the 10th International
Conference on Intelligent Autonomous Systems, pp.229--237,
2008.
|
|
|

 までお願いします.
までお願いします.