|
|
Macra
- Papers
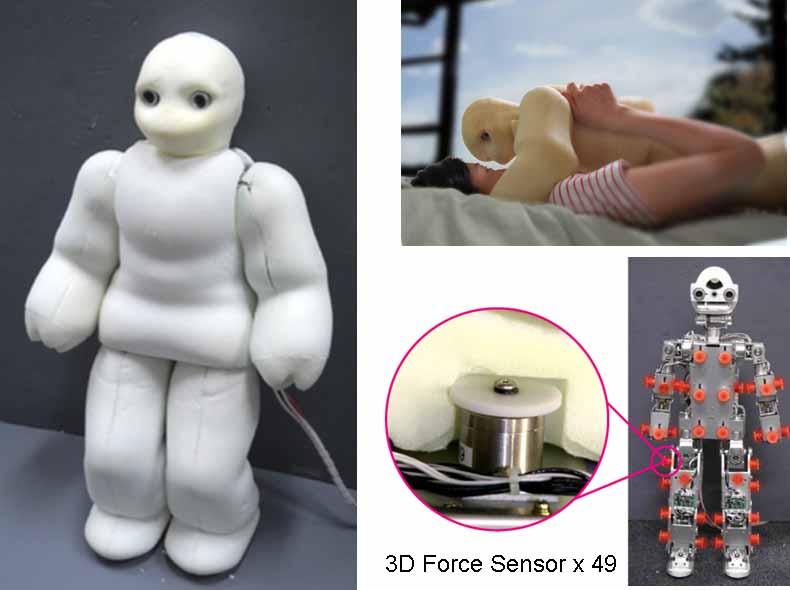
- Marika HAYASHI, Toshiaki MAKI, Yui ISHIZAKA, Shigeru KANZAKI,
Tomoaki YOSHIKAI, Masayuki INABA: Development of Humanoid Robot with
Polyurethane Foam Flesh and Tactile, in The 24th Annual Conference
on Robotics Society of Japan, 2H14, 2006.
- Marika Hayashi, Takashi Sagisaka, Yui Ishizaka, Tomoaki
Yoshikai, Masayuki Inaba: Development of Functional Whole-Body Flesh
with Distributed Three-axis Force Sensors to Enable Close
Interaction by Humanoids, in Proceedings of The 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.3610--3615, 2007.
- Tomoaki Yoshikai, Marika Hayashi, Yui Ishizaka, Takashi
Sagisaka, Masayuki Inaba: Behavior Integration for Whole-body Close
Interactions by a Humanoid with Soft Sensor Flesh, in Proceedings of
the 2007 IEEE-RAS International Conference on Humanoid Robots
(Humanoids 2007), , 2007.
- Tomoaki YOSHIKAI, Marika HAYASHI, Masayuki INABA: Behavior
Integration System for macra, a Humanoid with Soft Sensor Flesh, in
The 25th Annual Conference on Robotics Society of Japan, 1H32,
2007.
- Marika Hayashi, Takashi Sagisaka, Tomoaki Yoshikai, Masayuki
Inaba: Design Evaluation of Soft Humanoid Robot Exterior in respect
of Contact Behavior, in 2007 JSME Conference on Robotics and
Mechatronics, 1P1-H04, 2007.
- Marika HAYASHI, Tomoaki YOSHIKAI, Masayuki INABA: Sensing
through Distributed Three-Axis Force Sensors on Humanoid Robot with
Soft Exterior, in The 25th Annual Conference on Robotics Society of
Japan, 1H31, 2007.
- Marika HAYASHI, Yui ISHIZAKA, Ryohei UEDA, Tomoaki YOSHIKAI,
Masayuki INABA: Close Interaction of Humanoid with Soft Three-Axis
Force Sensing Exterior, in The 25th Annual Conference on Robotics
Society of Japan, 2L13, 2007.
- Marika Hayashi, Yui Ishizaka, Ryohei Ueda, Tomoaki Yoshikai,
Masayuki Inaba: Development of a Humanoid with Distributed
Deformation Sense with Full-Body Soft Plastic Foam Cover as Flesh of
a Robot, Journal of the Robotics Society of Japan, Vol.26, No.8,
pp.67--73, 2008.
- Tomoaki Yoshikai, Takashi Sagisaka, Marika Hayashi, Masayuki Inaba:
Acquisition and Realization of a Rolling-Over Motion for a Humanoid
with Soft Sensor Flesh, Journal of Robotics and Mechatronics,
Vol.20, No.2, pp.241--249, 2008.
- Tomoaki YOSHIKAI, Marika HAYASHI, Masayuki Inaba: Simultaneous
Learning and Recalling System for Wholebody Motion of a Humanoid
with Soft Sensor Flesh, in Proceedings of the 10th International
Conference on Intelligent Autonomous Systems, pp.229--237,
2008.
|
|
|