|
|
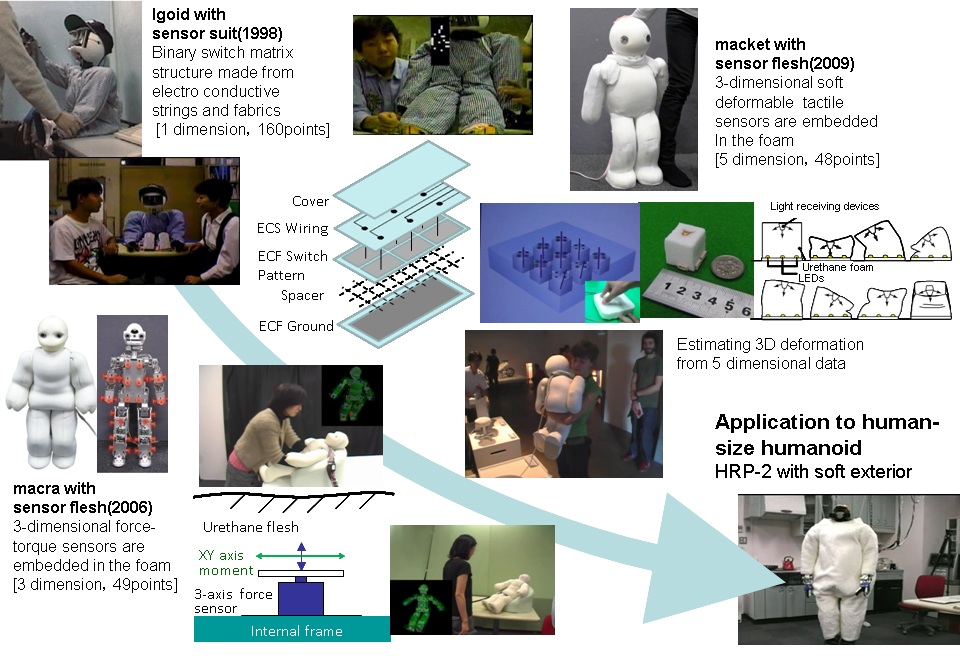
全身被覆柔軟外装センサースーツ
- Papers
- 吉海智晃, 福島寛子, 小林一也, 稲葉雅幸: 対人インタラクションのための伸縮可能な被覆型柔軟ニットセンサ外装の開発, 日本ロボット学会誌, Vol.30, No.5, pp.505--514, 2012.
- Marika Hayashi, Takashi Sagisaka, Yui Ishizaka, Tomoaki
Yoshikai, Masayuki Inaba: Development of Functional Whole-Body Flesh
with Distributed Three-axis Force Sensors to Enable Close
Interaction by Humanoids, in Proceedings of The 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.3610--3615, 2007.
- Tomoaki Yoshikai, Marika Hayashi, Yui Ishizaka, Takashi
Sagisaka, Masayuki Inaba: Behavior Integration for Whole-body Close
Interactions by a Humanoid with Soft Sensor Flesh, in Proceedings of
the 2007 IEEE-RAS International Conference on Humanoid Robots
(Humanoids 2007), , 2007.
- 林摩梨花, 鷺坂隆志, 吉海智晃, 稲葉雅幸: 全身接触行動を行うヒュー
マノイドロボットのための柔軟外装の設計評価, in 日本機械学会ロボティ
クス・メカトロニクス講演会'07 講演論文集, 1P1-H04, 2007.
- 林摩梨花, 吉海智晃, 稲葉雅幸: 発泡樹脂柔軟外装を持つヒューマノ
イドにおける全身分布三軸力センシング, in 第25回日本ロボット学会学術
講演会講演論文集, 1H31, 2007.
- Yukiko Hoshino, Masayuki Inaba, Hirochika Inoue:
Model and Processing of Whole-body Tactile Sensor Suit for
Human-Robot Contact Interaction,
in Proceedings of the 1998 IEEE International Conference on Robotics
and Automation, pp.2281--2286, 1998.
-
稲葉 雅幸, 星野 由紀子, 井上 博允:
導電性ファブリックを用いた全身被覆型触覚センサスーツ,
日本ロボット学会誌, Vol.16, No.1, pp.80--86, 1998.
-
Masayuki Inaba:
Extended Vision with Robot Sensor Suit: Primary Sensor Image
Approach in Interfacing Body to Brain, in G. Giralt and G. Hirzinger
(Eds.): Robotics Research, International Symposium on Robotics
Research, pp.499--508, Springer, 1996.
|
|
|

 までお願いします.
までお願いします.