|
|
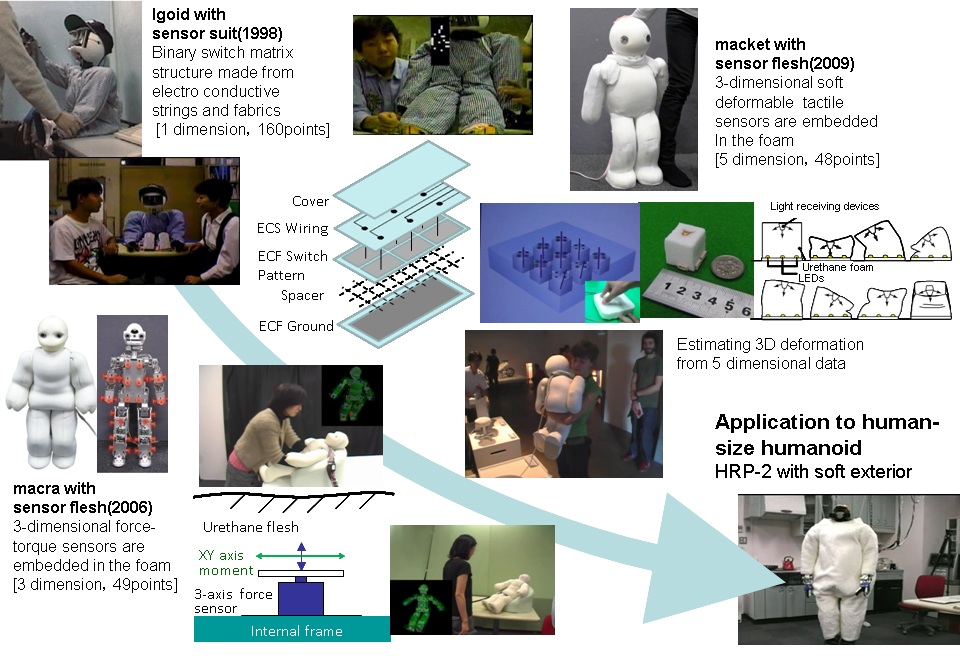
Whole-body Sensor Suit Flesh
- Papers
- Tomoaki Yoshikai, Hiroko Fukushima, Kazuya Kobayashi, Masayuki Inaba: Development of Soft Stretchable Enclosing Type Knit Sensor Exterior for Human-Robot Interaction, Journal of Robotics Society of Japan, Vol.30, No.5, pp.505--514, 2012.
- Marika Hayashi, Takashi Sagisaka, Yui Ishizaka, Tomoaki
Yoshikai, Masayuki Inaba: Development of Functional Whole-Body Flesh
with Distributed Three-axis Force Sensors to Enable Close
Interaction by Humanoids, in Proceedings of The 2007 IEEE/RSJ
International Conference on Intelligent Robots and Systems,
pp.3610--3615, 2007.
- Tomoaki Yoshikai, Marika Hayashi, Yui Ishizaka, Takashi
Sagisaka, Masayuki Inaba: Behavior Integration for Whole-body Close
Interactions by a Humanoid with Soft Sensor Flesh, in Proceedings of
the 2007 IEEE-RAS International Conference on Humanoid Robots
(Humanoids 2007), , 2007.
- Marika Hayashi, Takashi Sagisaka, Tomoaki Yoshikai, Masayuki
Inaba: Design Evaluation of Soft Humanoid Robot Exterior in respect
of Contact Behavior, in 2007 JSME Conference on Robotics and
Mechatronics, 1P1-H04, 2007.
- Marika HAYASHI, Tomoaki YOSHIKAI, Masayuki INABA: Sensing
through Distributed Three-Axis Force Sensors on Humanoid Robot with
Soft Exterior, in The 25th Annual Conference on Robotics Society of
Japan, 1H31, 2007.
- Yukiko Hoshino, Masayuki Inaba, Hirochika Inoue:
Model and Processing of Whole-body Tactile Sensor Suit for
Human-Robot Contact Interaction,
in Proceedings of the 1998 IEEE International Conference on Robotics
and Automation, pp.2281--2286, 1998.
-
Masayuki Inaba:
Extended Vision with Robot Sensor Suit: Primary Sensor Image
Approach in Interfacing Body to Brain, in G. Giralt and G. Hirzinger
(Eds.): Robotics Research, International Symposium on Robotics
Research, pp.499--508, Springer, 1996.
|
|
|