
3Dロボットビジョンモジュール
JSKでは1989年よりロボットのための視覚として画像の局所相関演算に 基づく各種ロボット視覚機能の研究開発を行い,視覚に基づくロボット 行動研究を継続して実現してきている. 局所相関演算に基づくステレオ追跡処理により,特徴点の三次元追跡フ ロー情報を生成することで,ロボットの自己運動,外界移動物体の追跡 が可能なシステムを構築することができている. 経済産業省次世代ロボット知能化プロジェクトにお けるRTミドルウェアにより再利用可能コンポーネントとして利用可能な モジュールとなっている.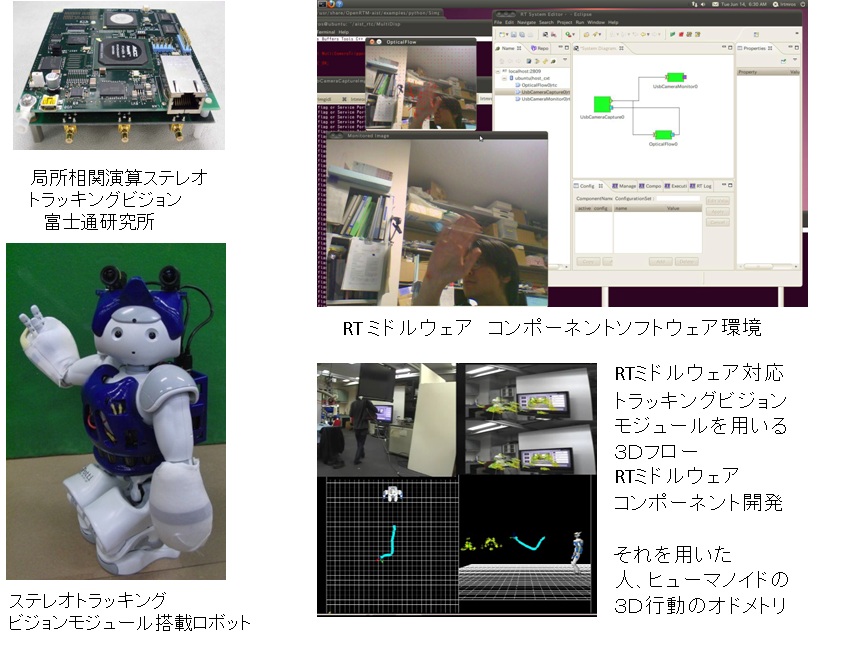
画像の局所相関演算は画像の類似度を計算する処理で,画像のテ ンプレートマッチング,2次元対象追跡,オプティカルフロー生成,両 眼立体視対応,デプスマップ画像生成, 三次元フロー生成などの処理の基本処理として利用できるが, 局所相関演算処理は重い計算処理であり,シストリックアレイを利用す るプロセッサを実現することで高速な処理が可能となる. JSKでは,MPEG処理における運動領域を検出する処理に利用され,専用プロセッサ が開発されたことでロボット視覚に組み込むことができるシステムを 1992年に開発し,富士通研究所により専用の新しい局所相関演算プロセッ サが開発されロボットビジョンとして実用化がなされてきている. 最新の局所相関演算ステレオトラッキングビジョンモジュールでは, 正規化相関,各種画像前処理コンボリューション機能なども搭載した LSIを組込みLinuxを搭載したPowerPCプロセッサにより制御管理させる 構成となっている.
- 参考文献
- 秋元 貴博, 後藤 健文, 小島 光晴, 吉海 智晃, 稲葉 雅幸: 実時間自己/他者運動分離認識RTCを用いたヒューマノイドの近傍移動物体 軌跡推定・追従行動の実現, in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 1A1-H11, 2011.
- 後藤 健文, 植木 竜佑, 小島 光晴, 吉海 智晃, 岡田 慧, 稲葉 雅幸: 次世代知能化視覚モジュールを用いた歩行中の頭部3次元運動推定による視覚揺動抑制機能の実現, in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2A1-F16, 2010.
- 秋元貴博, アイザック・アンソニー・アルバ, 後藤健文, 小林一也, 小島光 晴, 吉海智晃, 稲葉雅幸: 次世代知能化画像認識モジュールを備えた小型ヒューマノイドロボットによ る落下物体認識拾い上げ行動の実現, in 第11回SICEシステムインテグレー ション部門講演会講演概要集, 3B3-3, 2010.
- 矢口 裕明, 吉海 智晃, 岡田 慧, 稲葉 雅幸: 視覚による箱状物体検出RTコ ンポーネントに基づく二次元地図の三次元拡張の実現, in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集, 2P1-B07, 2010.
- 矢口 裕明, Isaac Anthony Alba, 山本 邦彦, 吉海智晃, 岡田慧, 稲葉雅幸: RTミドルウェアによる移動ロボットのためのハイブリッドナビゲーションシ ステムの構築, 第11回SICEシステムインテグレーション部門講演会講演概要 集, 2O3-4, 2010.
 までお願いします.
までお願いします.