|
|
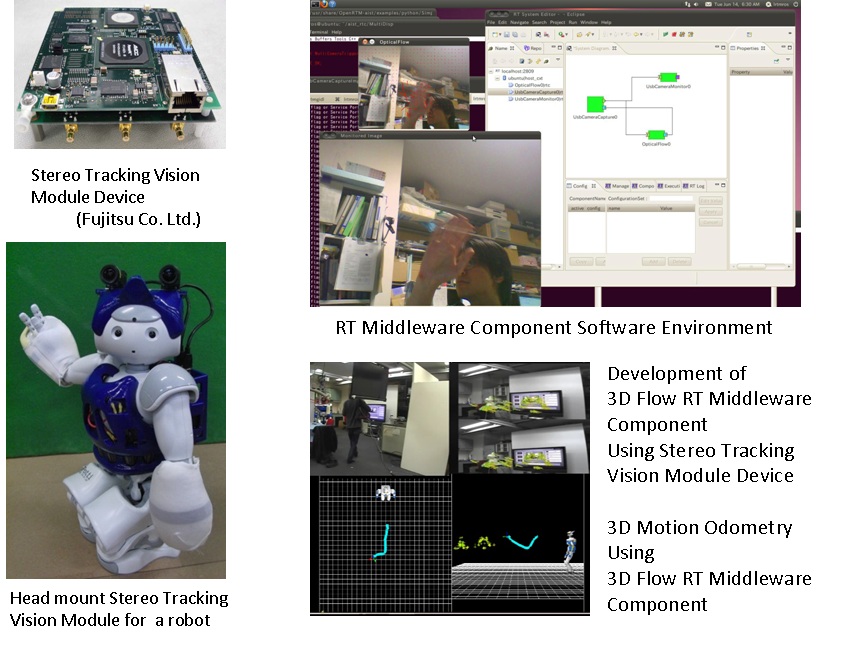
3D Robot Vision Module
- Hiroaki YAGUCHI, Tomoaki YOSHIKAI, Kei OKADA, Masayuki INABA:
RTMEXTender: Developper Support Tool for OpenRTM,
in 2011 JSME Conference on Robotics and Mechatronics, 2P1-K15, 2011.
-
Ryo HANAI, Masayuki INABA: Development of motion planning RTC and
its use on a dual-arm robot,
in 2011 JSME Conference on Robotics and Mechatronics, 1A1-H12, 2011.
- Kunihiko YAMAMOTO, Anthony ISAAC, Hiroaki YAGUCHI, Tomoaki YOSHIKAI, Kei OKADA, Masayuki INABA:
Construction of Guide Robot System Focusing on the Reusability of RT-component,
in 2011 JSME Conference on Robotics and Mechatronics, 2A1-H11, 2011.
- Takahiro Akimoto, Takefumi Goto, Mitsuharu Kojima, Tomoaki
Yoshikai, Masayuki Inaba: Realization of Trajectory Estimation and
Following Action for Close Moving Object by Using RTC for
Real-time Motion Partition between Self and Others,
in 2011 JSME Conference on Robotics and Mechatronics, 1A1-H11, 2011.
-
Tomoaki Yoshikai, Kotaro Nagahama, Hiroko Kobori, Takahiro Akimoto, Isaac Anthony Alba, Tsukasa Ito, Kei Okada, Masayuki Inaba: Realization of multi robot application by mutual connection of RTM
and ROS based on EusLisp, in Proceedings of the 11th SICE System Integration Division Annual Conference, 3B2-2, 2010.
- Hiroaki Yaguchi, Tomoaki Yoshikai, Kei Okada, Masayuki Inaba:
A method of 3D extension to 2D SLAM using box detection RT component from visual information, in 2010 JSME Conference on Robotics and Mechatronics, 2P1-B07, 2010.
-
Hiroaki Yaguchi, Isaac Anthony Alba, Kunihiko Yamamoto, Tomoaki Yoshikai, Kei Okada, Masayuki Inaba: Hybrid Navigation System for Mobile Robot using RT Middleware, in Proceedings of the 11th SICE System Integration Division Annual Conference, 2O3-4, 2010.
|
|
|