|
|
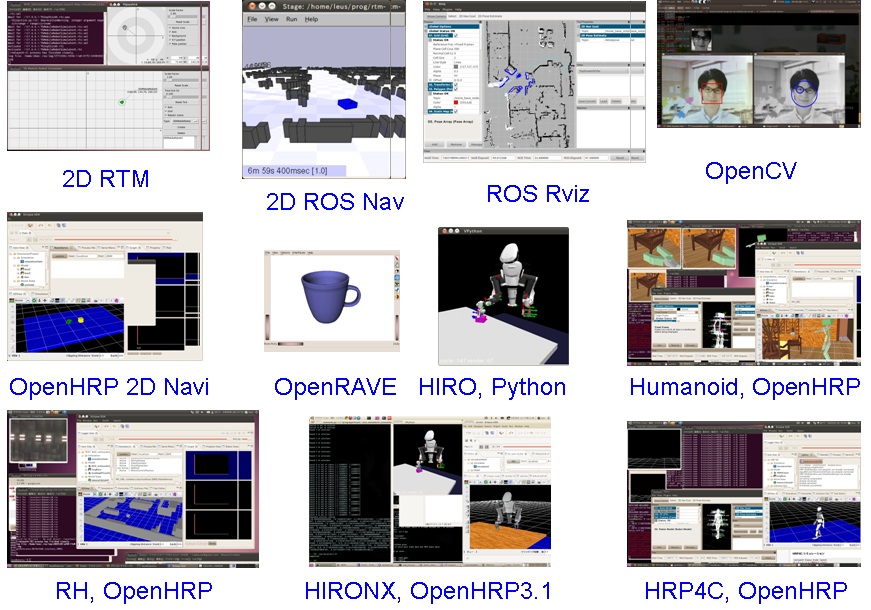
オープンソースロボットソフトウェアの相互連携
オープンソースロボットソフトウェアの
Euslisp,
OpenRTM,
OpenHRP,
ROS,
OpenRAVE等の
相互連携を行っている.
各種連携の方法は
rtm-ros-roboticsというサイトにおいて
講義・演習の中でチュートリアルとともに公開されており,
誰もが試すことができるようになっている.
その中では,実ロボットがなくとも公開されているロボットモデルを
用いてシミュレーションで挙動を確認できる環境となっており,
Ubuntu10.04の環境上でソフトウェアの挙動を確認できるようになって
いる.
- 参考文献
- 矢口 裕明, 吉海 智晃, 岡田 慧, 稲葉 雅幸:
RTMEXTender: OpenRTM開発支援ツール,
日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集,
2P1-K15, 2011.
- 花井 亮, 稲葉 雅幸:
動作計画RTコンポーネントの開発と双腕ロボットでの利用,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 1A1-H12, 2011.
-
山本 邦彦, Anthony Isaac, 矢口 裕明, 吉海 智晃, 岡田 慧, 稲葉 雅幸:
案内ロボットの実現におけるRTコンポーネントの再利用性に着目したシステム構成法,
in 日本機械学会ロボティクス・メカトロニクス講演会'11 講演論文集, 2A1-H11, 2011.
-
吉海智晃, 長濱虎太郎, 小堀浩子, 秋元貴博, Isaac Anthony Alba, 伊藤司,
岡田慧, 稲葉雅幸:
EusLispをコアにしたRTMとROSの相互接続による\\ マルチロボットアプリケー
ションの実現,
第11回SICEシステムインテグレーション部門講演会講演概要集, 3B2-2, 2010.
-
花井 亮, 山崎 公俊, 矢口 裕明, 稲葉 雅幸: PR2による物品片付け機能実
現のための開発事例 〜ROSのシステムとライブラリスタックに着目して〜,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集,
2A2-B19, 2010.
-
山崎 公俊, 矢口 裕明, 花井 亮, 稲葉 雅幸: PR2の認識・把持・移動機能
統合による日用物品片付け行動の実現,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集,
2A2-A18, 2010.
- 矢口 裕明, 花井 亮, 山崎 公俊, 稲葉 雅幸:
PR2による把持動作のための複合視覚を用いた小型物体認識手法,
in 日本機械学会ロボティクス・メカトロニクス講演会'10 講演論文集,
2A2-B20, 2010.
|
|
|

 までお願いします.
までお願いします.