|
|
|
|
 研究概要
研究概要
|
|
|
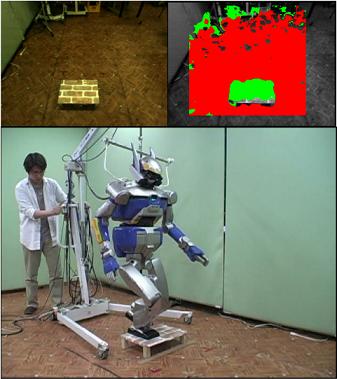
ヒューマノイドロボットが環境中で知的に振舞うためには
外界を認識することが必要不可欠である.
外界センサである視覚センサを用いることで
未知の三次元環境において
環境モデルを生成し移動経路を計画,実行するという
統合型のシステムの構築が可能になってきている.
これまでの研究で,ハフ変換とロバスト推定を用いた高精度平面検出に基づく段差乗り越え行動や,平行エッジ検出に基づく紐のマニピュレーション,箱のTumbling操作による形状表面モデルの獲得,などが実現されてきている.
|
|
|
|
|
ムービー(準備中)
|
|
- 平面検出による段差乗り越え動作
- 紐のマニピュレーション動作
- Tumbling操作による表面モデルの獲得
|
|
|
参考文献
|
|
- 岡田慧, 小倉 崇, 羽根田 淳, 稲葉 雅幸 : "ハフ変換とロバスト推定を用いた高精度平面検出に基づくヒューマノイドの視覚に基づく段差乗り越え行動", 第5回SICEシステムインテグレーション部門講演
会講演概要集, 174--175, 2004.
- 岡田 慧, Fabien Gravot, 小倉 崇, 羽根田 淳, 藤本 純也, 稲邑 哲也, 稲葉 雅幸
: "高次模倣機能におけるヒューマノイドの空間行動計画能力に基づく行為生成への取組み", 第5回SICEシステムインテグレーション部門講演会講演概要集, 573--574,
2004.
- 佐藤 顕治, 岡田 慧, 稲葉 雅幸
:"ヒューマノイドによる紐操作のための並行エッジ検出に基づく視覚機能" ,
第23回日本ロボット学会学術講演会講演論文集, 2E21, 2005.
- 小島 光晴, 小倉 崇, 岡田 慧, 稲邑 哲也, 稲葉 雅幸 : "物を手で扱ってテクスチャつき対象モデルを獲得するヒューマノイドの研究", Humanoids acquiring texture mapped object models by manipulation, 第23回日本ロボット学会学術講演会講演論文集, 3H13, 2005.
|

 までお願いします。
までお願いします。