|
|
|
|
 Research Summary
Research Summary
|
|
|
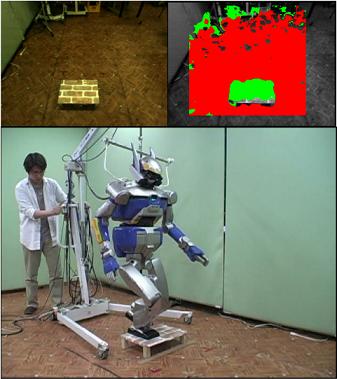
In order for a humanoid robot to be able to intelligently navigate through an environment, recognition of the physical world around it is essential. With the aid of external visual sensors, the HRP2 has an integrated system that enables it to create models of newly encountered three-dimensional environments, conduct motion planning, and then transverse these environments.
Our other research includes implementing behaviors for transversing uneven surfaces, using high precision flat surface detection through robust estimation and Hough transforms; paper manipulation using parallel edge detection; and, box rotational manipulation using the acquisition of surface texture models.
|
|
|
|
|
Movies (under construction)
|
|
- Uneven surface transversion
- Paper manipulation
- The acquision of surface models for box tumbling
|
|
|
References
|
|
- Kei Okada, Takashi Ogura, Atsushi Haneda, Masayuki Inaba:
Step Over Behavior of Humanoid using Precise PSF based-on Hough Transform and Robust Estimation,
in Proceedings of the 5th SICE System Integration Division Annual Conference, pp.174--175, 2004.
- Kei Okada, Fabien Gravot, Takashi Ogura, Atsushi Haneda, Junya Fujimoto, Tetsuya Inamura, Masayuki Inaba:
Toward Behavior Generation on High-Level Imitation using Action Planning Skill of Humanoids,
in Proceedings of the 5th SICE System Integration Division Annual Conference, pp.573--574, 2004.
- enji SATO, Kei OKADA, Masayuki INABA:
Humanoids' Vision Based on Parallel Edge Detector for String Manipulation,
in The 23rd Annual Conference on Robotics Society of Japan, 2E21, 20
- Mitsuharu KOJIMA, Takashi OGURA, Kei OKADA, Tetsunari INAMURA, Masayuki INABA:
Humanoids acquiring texture mapped object models by manipulation,
in The 23rd Annual Conference on Robotics Society of Japan, 3H13, 2005.
|