
Humanoid Robot Platform HRP2-JSK
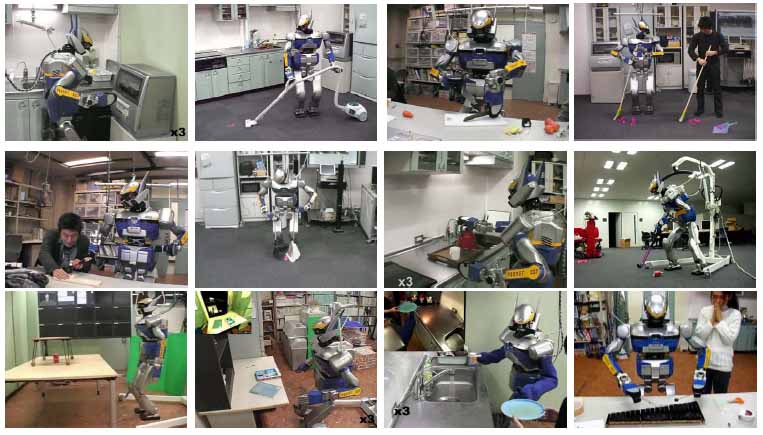
The life-sized humanoid robot HRP2 is the final product of the Humanoid Robot Platform (HRP) project, created out of the Ministry of Economy, Trade, and Industry 1998-2002 initiative,“Human-Robot Cooperation and Coexistence Systems Research and Development” (project leader Hirochika Inoue, Professor Emeritus at the University of Tokyo). The HRP2 was manufactured at Kawada Industries, and is used as a base for research and education at universities and laboratories around Japan. The National Institute of Advanced Industrial Science and Technology (AIST) developed and publicly released the robot's OpenHRP software platform. The development of the HRP2 at Kawada Industries is tied to research on the H6 and H7 life-sized humanoid robots at the Jouhou System Kougaku Laboratory (JSK, headed by Professor Inoue and Professor Inaba).Using the HRP2 as a research platform, JSK performs research on integrated robot intelligence systems, making the HRP2 usable in the real world, and developing software within the creative informatics field that can adapt to computer systems of the next generation.
- Research topics
- References
- Kei Okada, Takashi Ogura, Atushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue : "Integrated System Software for HRP2 Humanoid", Proc. of International Conference on Robotics and Automation (ICRA'04), pp 3207-3212, 2004.
- Kei Okada, Masayuki Inaba, Hirochika Inoue : "Real-Time and Precise Self Collision Detection System for Humanoid Robots", Proc. of The 2005 IEEE International Conference on Robotics and Automation}, 1072--1077, 2005.
- Kei Okada, Takashi Ogura, Atsushi Haneda, Junya Fujimoto, Fabien Gravot, Masayuki Inaba :"Humanoid Motion Generation System on HRP2-JSK for Daily Life Environment" 2005 International Conference on Mechatronics and Automation (ICMA05), 1772--1777, 2005.
- Takashi OGURA, Kei OKADA, Masayuki INABA, Hirochika INOUE: The United Behavior Planning System for Integrated System Software on HRP-2, in The 21th Annual Conference on Robotics Society of Japan, 2A13, 2003.
- Kei OKADA, Masayuki INABA, Hirochika INOUE: Vision based Whole-body Motion using Integrated System Software on HRP-2, in The 21th Annual Conference on Robotics Society of Japan, 2A22, 2003.
- Kei Okada, Takashi Ogura, Atsushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue: System Software Integration on HRP2 Humanoid and Behavior Execution, in Proceedings of The 9th Robotics Symposia, pp.392--397, 2004.
- Kei Okada, Masayuki Inaba, Hirochika Inoue: Integrated System Software Environment for HRP2 Humanoid and Upper Body Control Plugin, in ROBOMEC04, 2P1-H-75, 2004.
- Kei Okada, Masayuki Inaba, Hirochika Inoue: Mechano-Informatics Seminar for Undergraduate Students using the HRP2 Humanoid Robot, in ROBOMEC04, 2P2-L2-39, 2004.
