
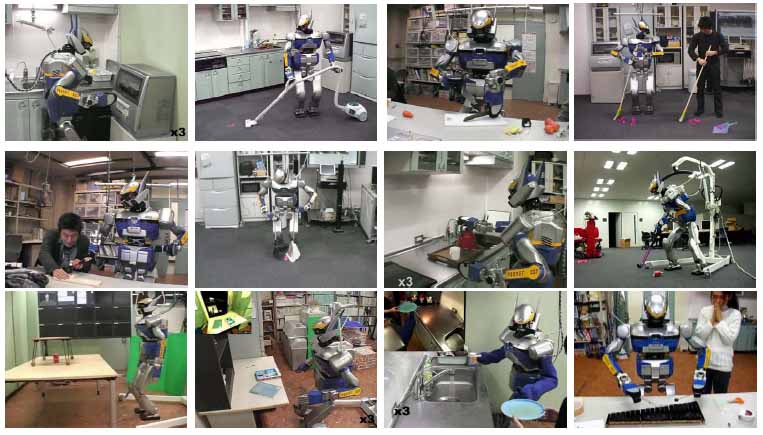
ヒューマノイドロボットプラットホームHRP2-JSK
等身大ヒューマノイドロボットHRP2は,経済産業省の1998-2002「人間協調・ 共存型ロボットシステムの研究開発」(プロジェクトリーダ 井上博允 東京大 学名誉教授)において開発されたヒューマノイドロボットプラットフォーム (HRP)の最終成果機である. これは川田工業により開発製造され,2003年から全 国の大学・研究所において研究・教育用の基盤として利用できるようになった. また,産業技術総合研究所を中心にソフトウェアプラットフォームOpenHRPが研 究開発され公開されている. 東京大学 情報システム工学研究室(井上・稲葉 研究室)における等身大ヒューマノイドH6・H7号機の研究において川田工 業がロボット開発を行いHRP2の開発につながった.東京大学情報 システム工学研究室(JSK)では,HRP2をもとに知能ロボット統合システムの ソフトウェア研究を行い,ヒューマノイドロボットHRP2をを実世界で行動する 次世代の新しい計算機ととらえ情報理工学系研究科におけるソフトウェアの人 材養成プログラムへ展開している.
- 参考文献
- Kei Okada, Takashi Ogura, Atushi Haneda, Daisuke Kousaka, Hiroyuki Nakai, Masayuki Inaba, Hirochika Inoue : "Integrated System Software for HRP2 Humanoid", Proc. of International Conference on Robotics and Automation (ICRA'04), pp 3207-3212, 2004.
- Kei Okada, Masayuki Inaba, Hirochika Inoue : "Real-Time and Precise Self Collision Detection System for Humanoid Robots", Proc. of The 2005 IEEE International Conference on Robotics and Automation}, 1072--1077, 2005.
- Kei Okada, Takashi Ogura, Atsushi Haneda, Junya Fujimoto, Fabien Gravot, Masayuki Inaba :"Humanoid Motion Generation System on HRP2-JSK for Daily Life Environment" 2005 International Conference on Mechatronics and Automation (ICMA05), 1772--1777, 2005.
- 小倉 崇, 岡田 慧, 稲葉 雅幸, 井上 博允 : "HRP-2における統合型システムソフトウェア環境による統合行動計画システム", 第21回ロボット学会学術講演会予稿集, pp 2A13, 2003.
- 岡田 慧, 小倉 崇, 稲葉 雅幸, 井上 博允 : "HRP-2における統合型システムソフトウェア環境による三次元視覚に基づく全身動作生成法", 第21回ロボット学会学術講演会予稿集, pp 2A22, 2003.
- 岡田 慧, 小倉 崇, 羽根田 淳, 幸坂 大輔, 中井 博之, 稲葉 雅幸, 井上 博允 : "HRP2ヒューマノイド統合システムソフトウェア環境と行動実験", 第9回ロボティクスシンポジア予稿集, pp 392-397, 2004.
- 岡田 慧, 稲葉 雅幸, 井上 博允 : "HRP2ヒューマノイド統合システムソフトウェア環境と上半身制御プラグイン", 日本機械学会ロボティクス・メカトロニクス講演会'04 講演論文集, pp 2P2-H-75, 2004.
- 岡田 慧, 稲葉 雅幸, 井上 博允 : "HRP2ヒューマノイドを用いた学部三年生向け機械情報工学ゼミナール", 日本機械学会ロボティクス・メカトロニクス講演会'04 講演論文集, pp 2P2-L2-39, 2004.
 までお願いします.
までお願いします.