|
|
|
|
 研究概要
研究概要
|
|
|
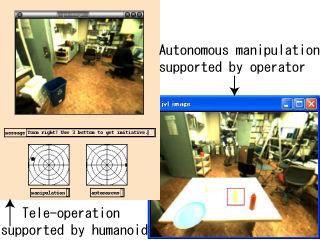
遠隔操作型ヒューマノイドにおいて全ての行動を人間が操るのではなく,
その一部をヒューマノイドが自律的に行うことができると,操作性が向上する.
また,その逆で自律行動時に人が介入し操作することで,ミスを回避し素早く
成功に導くこともできる.どちらにおいても重要なのは,いつどのような形で
自律行動と遠隔操作を切り替えるか,である.
本研究ではヒューマノイドとのインタラクティブなやり取りを用いてこれを
実装する手法を提案し,その実行例として等身大ヒューマノイドを用いた
実験結果を示した.
自律行動→遠隔操作が起きる例としては,操作対象認識に失敗したときなどに,
人に場所を尋ねる,などを上げた.その際,ヒューマノイドは自身に必要な情報を
明確にした上で,部分的に人のサポートを受ける形とした.
遠隔操縦→自律行動が起きる例としては,カメラ画像のみを元に人が操縦している
状況で,ヒューマノイドは,どう行動すべきかの確信度を,過去の操縦データから
常に計算し,人の操縦が間違いであるとの確信度が高まると,自律的に行動
(回避行動など)を行う.確信度の計算には,稲邑らによるPexisという,
ベイジアンネットに基づくシステムを利用した.
|
|
|
|
|
ムービー(準備中)
|
|
|
|
|
|
参考文献
|
|
- 古城直樹,園田朋之,稲邑哲也,稲葉雅幸.
自律行動と遠隔操作の対話的切替え機構を備えたヒューマノイドシステムの構成法.
第5回SICE システムインテグレーション部門講演会講演概要集, 2D2-3, 2004.
- 古城直樹.自律行動との対話的切り替え機構を備えた遠隔操縦ロボットの研究.
卒業論文,2005.
|

 までお願いします。
までお願いします。