|
|
|
|
 Research Abstract
Research Abstract
|
|
|
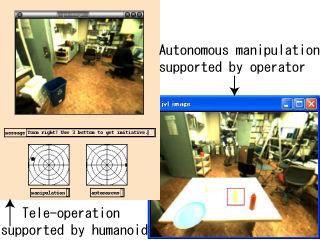
we introduce an interactive method to integrate automatic behavior and
teleoperation. In various environments, automatic behavior programmed in
advance might not work. Humanoids need support by human using tele-operation.
On the other hand, operability would be better with support of humanoid in
tele-operation.
We propose stochastic method to resolve when and how humanoids give up and
get over initiative. We actually implemented the method on a humanoid; HRP-2W.
As a example for the shift from autonomy to tele-operation, we proposed that
HRP-2W should ask the position of objects when he failed to recognize it.
On this occasion, HRP-2W should tell human what kind of information he needs
for appropriate support.
As for the shift from tele-operation to autonomy, we demonstrated that
HRP-2W should take over the initiative when operator's command seemed to be
wrong. HRP-2W computes the certainty factor from operator's commands of
the past. This system uses Inamura's "PEXIS", which utilizes Bayesian network.
|
|
|
|
|
Movie
|
|
- Autonomously grasp objects supported by operator[mpg]
|
|
|
References
|
|
-
Naoki Kojo, Tomoyuki Sonoda, Tetsunari Inamura, and Masayuki Inaba,
"A Humanoid Robot with Interactive Switching Mechanism between Automatic and Teleoperated Behavior",
Proceedings of 5th conference on System Integration division of SICE, 2D2-3, 2004.
[pdf] (in Japanese)
-
Naoki Kojo,
Research on Tele-operated Robots with Interactive Switching Mechanism against Autonomy.
Graduation Thesis, 2005.
[pdf] (in Japanese)
|