|
|
|
|
 HRP-2W
HRP-2W
|
|
|
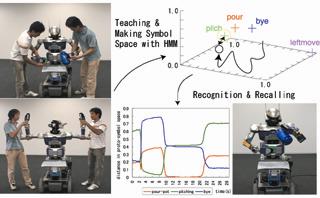
本研究グループでは,人間とロボットとの対話,対話を通じた経験の共有,その蓄積された経験からの行動知能の発展,などを目指している.そのような研究を実施するために,上半身がヒューマノイド,下半身が車輪の移動機構であるヒューマノイドプラットフォームを開発した.車輪による移動機構により,転倒の危険性を排除して,高度な知能の研究に集中できるプラットフォームとした.
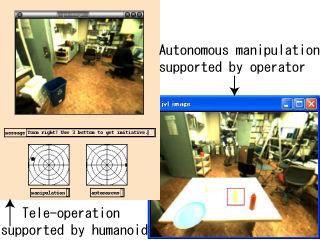
上半身は,川田工業(株)製の HRP2を採用しており,首2自由度,片腕7自由度,腰2自由度の合計20自由度を有している.頭部にはカラーステレオカメラと,2台のモノクロカメラが搭載され,音声対話や音響理解用のマイクロフォンが前方に2つ,側面に2つの計4つ搭載されている.また,手首には6軸力センサが搭載されており,物体を把持したり,外部環境との接触を行うタスクが実現可能である.
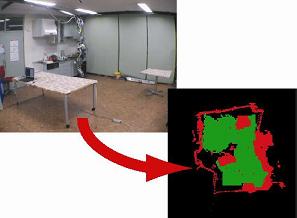
下半身の移動機構はドイツのInavacare社製の福祉用電動車椅子を利用している.左右の車輪による2自由度の移動の他,上下にスライドする直動機構が組み込まれており,上半身ヒューマノイドが設置されるベースの高さを変えることにより,身長を最高171cm,最低141cm と変動できる.また,SICK社製のLaser Range Finderも取り付けてあり,地図作成・自己位置推定,障害物検知などに利用可能である.
|
|
|
|
|
参考文献
|
|
-
稲邑 哲也,稲葉 雅幸, 井上 博允. "Human Robot Interaction with Shared Experiences," 21世紀COE「情報科学技術戦略コア」実世界情報システム国際シンポジウム,2003.
-
稲邑 哲也,稲葉 雅幸, 井上 博允. "共有経験に基づくヒューマンロボットインタラクション," 人と共存するコンピュータ・ロボット学〜実世界情報システム〜(東京大学21世紀COE実世界情報プロジェクト監修,佐藤知正編著), オーム社,pp. 42−50, 2004.
-
稲邑 哲也,稲葉 雅幸,井上 博允. "共通モジュールによるプロジェクト融合を可能とするコンテンツ指向型ヒューマノイドプラットフォーム", 日本機械学会ロボティクス・メカトロニクス講演会2004講演論文集,p. 2P1-H-74, 200
|

 までお願いします.
までお願いします.