 |
| Go to English page. |
|
|||||||||||||||||||||||
|
本サイトに掲載の記事・写真の無断転載を禁じます。 Copyright(C) 2003-2005 JSK. All rights reserved. No reproduction or republication without written permission. お問い合わせ等は  までお願いします。 までお願いします。
|
|||||||||||||||||||||||
|
| Go to English page. |
|
|||||||||||||||||||||||
|
本サイトに掲載の記事・写真の無断転載を禁じます。 Copyright(C) 2003-2005 JSK. All rights reserved. No reproduction or republication without written permission. お問い合わせ等は までお願いします。
|
|||||||||||||||||||||||

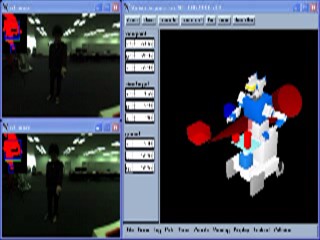 把持対象物体の指示
把持対象物体の指示

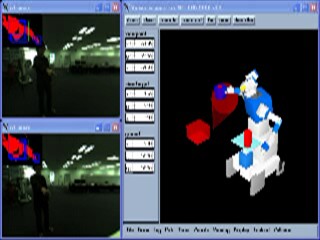 捨てる場所の指示
捨てる場所の指示