 |
| Go to Japanese page. |
|
|||||||||||||||||||||||
|
Copyright(C) 2005 JSK. All rights reserved. No reproduction or republication
without written permission. If you have any troubles, please e-mail to 
|
|||||||||||||||||||||||
|
| Go to Japanese page. |
|
|||||||||||||||||||||||
|
Copyright(C) 2005 JSK. All rights reserved. No reproduction or republication
without written permission. If you have any troubles, please e-mail to
|
|||||||||||||||||||||||

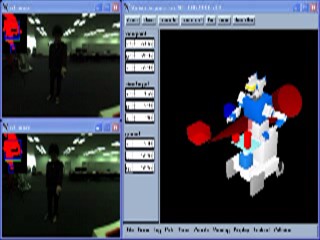 Teaching Object
Teaching Object

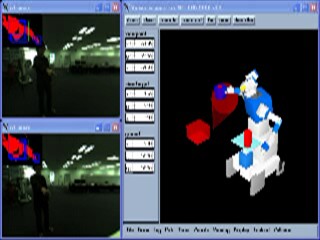 Teaching Position
Teaching Position