|
|
|
|
 研究概要
研究概要
|
|
|
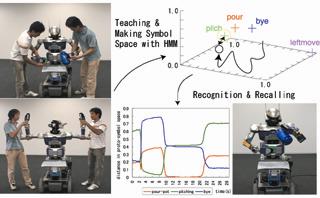
数多くのセンサ情報に基づいて行動を行う知能ロボットにおいて,各情報間の時系列の相関関係を
記憶しておくことは,新しい行動の獲得や状況の予測・認識を行う上で必要不可欠な要素である.
本研究では,複数センサからの時系列データを抽象化し,動作概念を獲得させることにより,動作教示、
状況認識,行動誘発,未学習中間動作の生成を実現する手法を提案している.実装には,連続分布型HMM
を用いて,時系列パターンから原始シンボル空間表現を記述させることのできる学習モデルを用いた.
実現例として,等身大ヒューマノイドの手を直接動かして教示し,行動を誘発させる実験に成功した.
|
|
|
|
|
ムービー
|
|
|
|
|
|
参考文献
|
|
- Tetsunari Inamura, Naoki Kojo, Tomoyuki Sonoda, Kazuyuki Sakamoto, Kei Okada and Masayuki Inaba: "Intent Imitation using Wearable Motion Capturing System with On-line Teaching of Task Attention," International Conference on Humanoid Robots, 2005. (accepted)
- Naoki Kojo, Tetsunari Inamura and Masayuki Inaba: "Behavior Induction by Geometric Relation between Symbols of Multi-sensory Pattern," Proc. of 9th International Conference on Autonomous Intelligent Systems, 2006. (accepted)
- 古城直樹,稲邑哲也,園田朋之,岡田慧,稲葉雅幸.
時系列マルチセンサパターンのシンボル化に基づくオンライン動作獲得と行動誘発.
第23回日本ロボット学会学術講演会講演論文集.
pp.1D21, 2005.
- 稲邑 哲也,稲葉 雅幸. "感覚と運動の時系列相関関係記述に基づく状況予測と行動誘発" 第22回日本ロボット学会学術講演会予稿集,p.3B28,2004.
|

 までお願いします。
までお願いします。